


0 引言
本文采用无人机遥感技术和神经网络学习技术,通过构建模型提取科尔沁沙丘-草甸相间地区典型地类的植被覆盖度,验证基于无人机影像提取植被覆盖度的准确率,并量化分析了植被覆盖度随时间的变化规律及其对环境因子的响应,以期为荒漠化地区生态环境监测和沙地植被恢复提供科学依据和数据基础。
1 研究区概况及研究方法
1.1 研究区概况
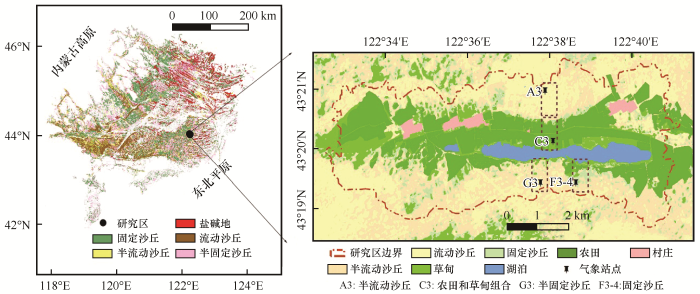
研究区(43°18′48″—43°21′24″ N、122°33′00″—122°41′00″E)位于科尔沁沙地东南缘,为典型的沙丘-草甸相间地区(图1)。地势中间低、南北高,海拔184—232 m,面积约55 km2。区内以梯级5条生态带为基础,在不同地貌上共布设24个气象环境监测点。该区多年平均降雨量389 mm,多年平均蒸发量1 412 mm,年平均气温6.6 ℃,年平均风速3—4 m·s-1[18]。沙丘地广泛分布的植被为小叶锦鸡儿(Caragana microphylla)、差巴嘎蒿(Artemisia halodendron)、叉分蓼(Polygonum divaricatum)、冷蒿(Artemisia frigida)等,草甸地广泛分布的植被为芦苇(Phragmites australis)、羊草(Leymus chinensis)、荆三棱(Scirpus yagara)等。受区内农牧业发展影响,部分草甸地被开垦为农田,逐渐形成了农田和草甸交错组合的地貌类型[19]。
图1
1.2 数据采集与处理
1.2.1 样地布设与无人机数据获取
选取一条典型梯级生态带,设置无人机飞行样地为500 m×1 000 m,飞行样地涵盖的典型地貌类型为半流动沙丘、农田和草甸组合、半固定沙丘、固定沙丘(图1),且在样地内随机布设多个30 m×30 m的样方进行地面调查。
试验于2019年植被生长期5—10月进行,使用大疆无人机(DJI Phantom 4 Pro V2.0,DJI Technology,中国深圳)进行可见光(RGB)正射影像拍摄。无人机及相机参数见表1。在植被生长初期和末期的5、6、8、9、10月,飞行频率为每月1次;在植被生长旺盛期的7月飞行2次。样地以条带飞行,飞行高度80 m,旁向重叠率65%,航向重叠率80%。每个飞行样地均布设地面控制点(总误差<0.5 m)便于无人机正射影像地理配准校正。
表1 无人机系统参数
Table 1
| 设备 | 基本参数 | |
|---|---|---|
| 无人机平台 | 总重量 | 1 375 g |
| 最大可承受风速 | 10 m·s-1 | |
| 最大飞行时间 | 30 min | |
| 卫星定位模块 | GPS/GLONASS | |
| 相机 | 影像传感器 | 1 inch CMOS |
| 有效像素 | 2 000万 | |
| 视场角(FOV) | 84° | |
采集的无人机影像选用Agisoft PhotoScan Professional(Agisoft LLC, St. Petersburg, Russia)进行处理[20]。经过对齐照片和生成密集点云、网格、纹理、DEM、正射影像以及地面控制点校正7个步骤得到无人机正射影像。像元空间分辨率为0.03 m。
1.2.2 环境数据
每个飞行样地的环境数据分别来自其内设置的自动气象站,包括空气温湿度、风速、风向、降水量、太阳净辐射及不同深度土壤含水率、土壤温度等(CR1000, Campbell Scientific, Inc., USA;Texas Electronics, Inc., USA),采集频次为10 min。
1.3 植被覆盖度获取
1.3.1 无人机影像像素标记
在使用Labelme软件时,对无人机垂直航拍的202张RGB影像有针对性地进行植被区域的标注,涵盖了不同的飞行时间、样地与植被覆盖度,如图2所示。将标注好的数据随机选取总量的80%作为训练数据,20%作为验证数据。
图2
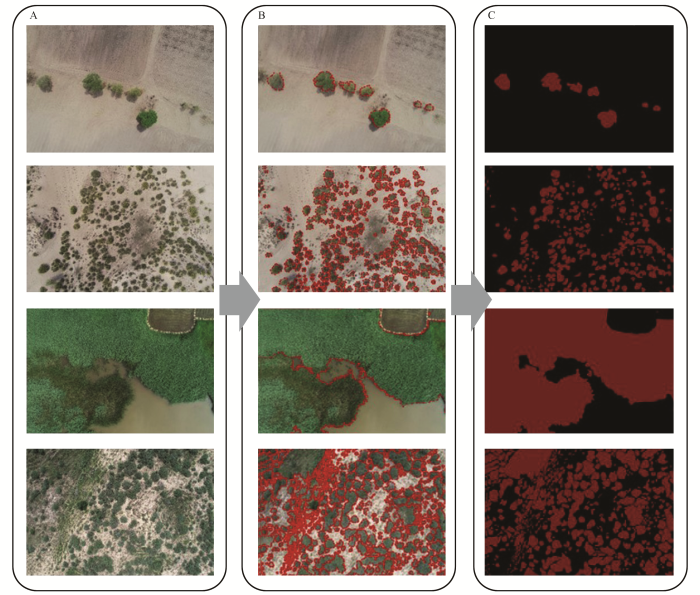
图2
无人机RGB影像原图(A)、植被标记(B)、标记完成(C)
Fig.2
Original pictures (A), vegetation marking pictures (B), and vegetation cover extraction (C) of UAV RGB images
1.3.2 U型神经网络深度学习模型
基于U型神经网络结构,使用跳跃连接的手段,使解码器中各解码层输出无人机影像特征与编码器对应(影像尺寸一致),各解码层为互通结构,充分利用了编码器中所有编码层提取的影像特征。相较于传统基于编码器-解码器的神经网络深度学习模型,能在少量训练数据下得到更精确的结果。具体模型框架示于图3。
图3
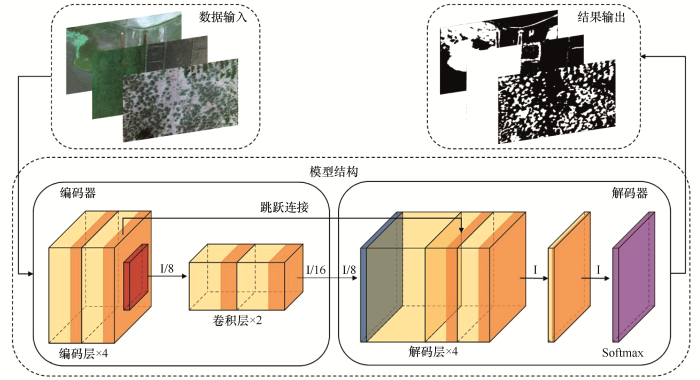
由图3可知,模型的编码器部分设计了4个编码层与2个卷积层,解码器由4个解码层和1个Softmax层组成,其中模型使用的激活函数为Relu函数。具体步骤为:无人机高清影像数据输入编码器,经过编码器进行特征提取,输出尺寸分别为I/2、I/4、I/8、I/16(I表示影像尺寸)大小的特征影像,数量分别为16、32、64、128、256,然后编码器输出的特征影像经过解码器解析后输出尺寸为I的影像分割结果,即分割好的植被覆盖区域(结果输出呈白色)与非植被覆盖区域(结果输出呈黑色),以此计算不同典型样地的植被覆盖度。
1.4 模型评价
模型评价指标为准确率,取值范围为(0,1],值越大,模型精度越高[21]。计算公式为:
式中:P为准确率;T为模型输出影像中正确分类的像素数量;F为模型输出影像中错误分类的像素数量。
1.5 相关性分析
Pearson相关分析可表示变量之间的相关性,偏相关分析可进一步衡量变量之间的密切程度,排除其他变量的影响[22]。运用Excel2016、SPSS25.0软件,以不同飞行样地的植被覆盖度为因变量,环境因子为自变量,分析了主要影响因素对植被覆盖度的响应。为准确明晰植被覆盖度与环境因子间的相互作用,考虑到气象站所测数据的空间有效性,选择各气象站周边同飞行样地整体地貌一致且植被覆盖度相似的30 m×30 m区域,与同期环境因子进行相关性分析。
2 结果与分析
2.1 基于U型神经网络深度学习模型提取植被覆盖度结果
2.1.1 模型训练及分析
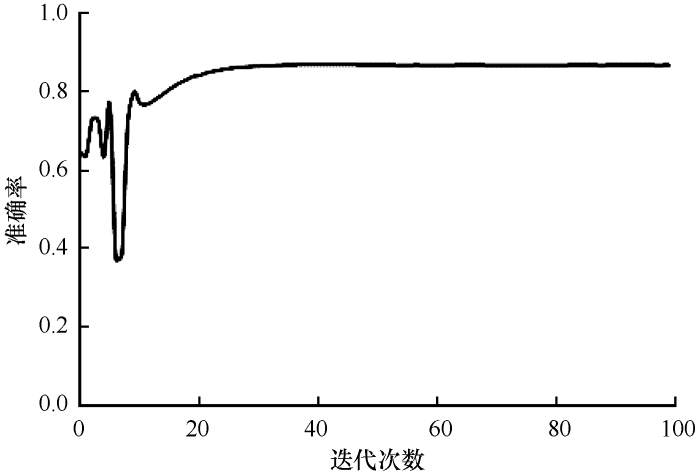
U型神经网络深度学习模型是在tensorflow2.1+python3.7的编程环境中实现的,模型的优化器为Adam,学习率为0.01,图片每批次输入的数量为8。在经过100次迭代后,构建的植被覆盖度提取模型训练集准确率为0.82,验证集准确率为0.86。从图4可以看出,随着迭代次数的不断增加,验证集准确率逐渐趋于平稳,即模型精度可达到0.86。
图4
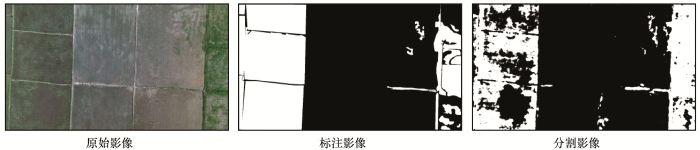
对验证集数据预测结果进行可视化分析,发现模型具有很好的去噪性质。从图5可发现,在进行人工标注时出现了部分标注错误,错将部分裸地标记为植被,但是,通过模型分割的影像将裸地与植被进行了准确划分,纠正了错误,使原始影像的植被部分被更好地提取出来。
图5
2.1.2 植被覆盖度提取结果
图6
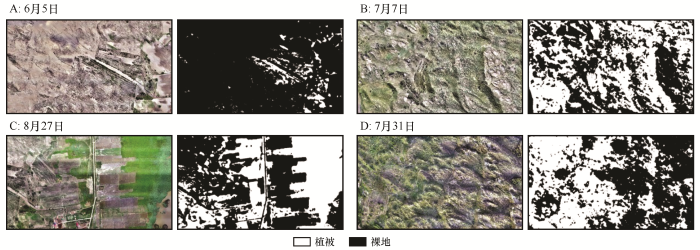
图6
不同时期、不同飞行样地植被覆盖度提取结果
Fig.6
The vegetation coverage extraction results of different flight plots in different periods
2.2 植被覆盖度的时间变化及其对环境的响应
2.2.1 植被覆盖度的时间变化
整体而言,受季风气候影响,各样地植被覆盖度2019年5—8月持续上升(图7),8月达到植被覆盖度峰值,分别为37.51%(半流动沙丘)、61.66%(半固定沙丘)、76.21%(农田和草甸组合)、80.57%(固定沙丘)。半固定沙丘、固定沙丘植被5—8月增长速度较半流动沙丘快,且整个生长期内,半固定、固定沙丘植被覆盖度均显著高于半流动沙丘植被覆盖度,差值在20%以上。农田和草甸组合、半固定沙丘、固定沙丘的植被覆盖度在9—10月均呈现快速下降趋势,平均减少速率分别为57.18%、41.86%、55.16%,而此期间半流动沙丘植被覆盖度则缓慢降低,减少速率为31.40%。
图7
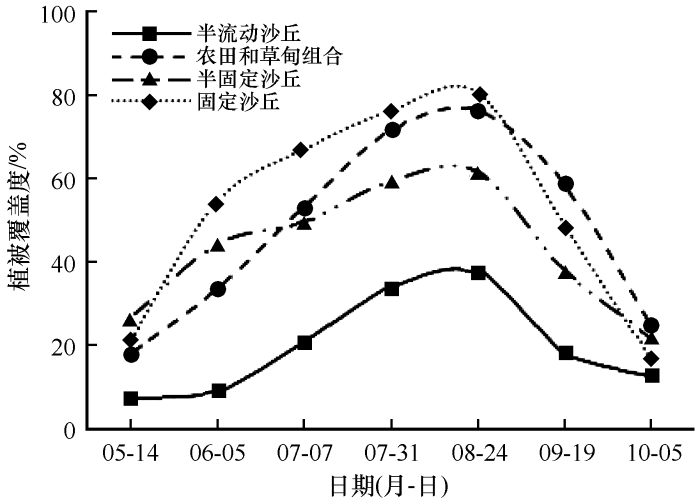
图7
不同样地植被生长期覆盖度的变化
Fig.7
The change of vegetation coverage in different areas from May to October
2.2.2 不同生态区植被覆盖度与环境因子的关系
由表2可知,植被覆盖度主要受降水量影响,与气温也具有显著相关性(P<0.01),相关系数分别为0.575和0.602,均大于其他环境因子。其次,不同层位的土壤温度对植被覆盖度均具有一定的影响,相关系数在0.45左右浮动。这说明,在半干旱地区,植被的生长发育不是由单一环境要素决定,降水量是植被覆盖度变化的主要驱动力,气温也是限制植被生长、分布的重要环境因子。
表2 植被覆盖度与环境影响因子的相关系数
Table 2
| 月降水量 | 月平均气温 | 10 cm深度 | 20 cm深度 | 40 cm深度 | 80 cm深度 | 月净辐射 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 土壤含水率 | 土壤温度 | 土壤含水率 | 土壤温度 | 土壤含水率 | 土壤温度 | 土壤含水率 | 土壤温度 | ||||||
| 0.575** | 0.602** | 0.159 | 0.455 | 0.121 | 0.474 | 0.139 | 0.490 | 0.078 | 0.456 | 0.174 | |||
**表示相关性极显著(P<0.01)。
对于半流动沙丘的植被覆盖度,降水量起决定性作用(相关系数0.810>0.340),在固定降水量条件下,植被覆盖度与气温的相关性显著降低(偏相关系数0.088)。这说明,在半流动沙丘,降水量为植被覆盖度的主要驱动力。对于农田和草甸组合,植被覆盖度与降水量的相关性较小(相关系数0.645)。半固定沙丘的植被覆盖度一方面受降水量的作用,另一方面也受限于气温,且相关性、偏相关性系数均在0.7左右。对于固定沙丘,气温与植被覆盖度的相关性略高于降水量。整体而言,在植被生长期,同期降水量对植被覆盖度的影响从高到低依次为半流动沙丘>半固定沙丘>固定沙丘>农田和草甸组合(表3)。
表3 不同地貌地植被覆盖度与降水量和气温的相关性
Table 3
| 植被覆盖度 | 相关分析 | 偏相关分析 | ||
|---|---|---|---|---|
| 降水量 | 气温 | 降水量(气温固定) | 气温(降水量固定) | |
| 半流动沙丘 | 0.810 | 0.340 | 0.784 | 0.088 |
| 农田和草甸组合 | 0.645 | 0.629 | 0.529 | 0.505 |
| 半固定沙丘 | 0.750 | 0.796 | 0.705 | 0.761 |
| 固定沙丘 | 0.682 | 0.785 | 0.574 | 0.720 |
3 讨论
无人机遥感填补了地面测量与低空间分辨率卫星遥感之间的空白,能够不受时间及其他影响因素限制,获得精细的厘米级遥感数据[23-25]。近年来,机器学习方法在图像分类应用中越来越被重视[26]。深度学习神经网络具有很强的自组织、自学习、自适应能力[27],适用于荒漠化地区不同地貌的植被覆盖度的提取。本文构建的模型精度(准确率为0.86)较Wang等[28]研究(模型准确率为0.78)有一定提升。但较Díaz-Varela等[29]研究结果(模型准确率为0.88)稍逊色,原因在于飞行样地地貌、生境复杂,植被斑块破碎度大,一些矮小植被很容易与裸地背景融合,难以准确区分。模型在构建之前需要人为标定数据,一方面受限于观察员的观察能力和主观判断,存在一定的人为误差,另一方面本文训练集样本量较少,倘若提高标定数据的数量,相信模型精度会得到一定程度的提升。在实际应用中,使用无人机影像对植被覆盖度进行研究还会因数据量庞大、处理过程耗时、一定范围的飞行区域等原因对模型的精度、普适性等造成影响[30-31]。因此,未来应进一步加强无人机技术的改进,深度结合卫星遥感,构建一体化遥感-生态研究体系。
植被覆盖度的分布特征及动态变化受气候、土壤等环境因子的影响,不同地貌类型的植被覆盖度不同[34]。在干旱荒漠生态系统中,降水量是植被覆盖度变化的主要驱动力[35-36],气温也是限制植被生长、分布的重要环境因子[37],与本文研究结果相符,降水量、气温与植被覆盖度具有极显著相关性(P<0.01)。对于半流动沙丘,植被覆盖度对降水量较气温更敏感,与刘婵等[5]研究相同,降水量是荒漠系统中重要的水分来源,更易引起半流动沙丘一年生植被生长的变化。农田与草甸组合的植被覆盖度与降水量的相关性相对不受人工干预的沙地小,在于其中农田的植被覆盖度还受控于播种收获、浇灌时间等。固定沙丘植被覆盖度变化对温度的响应略高于降水量,一方面由于固定沙丘植被多为灌木,短期降水后灌木植被绿度增加,但覆盖度不会发生显著变化,另一方面与降水量、植被之间具有时滞效应和累积效应有关[38-39]。本研究仅探究了月尺度上植被覆盖度变化与环境因子间的影响,然而响应过程是一个十分复杂的过程,受诸多因素多重影响,需要长期、多尺度数据加以支撑、完善。
4 结论
基于多时相无人机RGB影像和U型神经网络深度学习模型可高效、便捷地对沙丘-草甸相间地区典型地貌的植被覆盖度进行精确提取(准确率为86%),且模型具有很好的去噪性。提取的各典型地貌的植被覆盖度在整个生长期(5—10月)呈单峰状,8月达到峰值。降水量是荒漠区植被覆盖度变化的主要驱动力,其对植被覆盖度的影响为半流动沙丘>半固定沙丘>固定沙丘>农田和草甸组合。未来将进一步结合卫星遥感影像,实现大尺度荒漠区的植被信息快速、准确提取。
参考文献
Seasonal vegetation response to climate change in the Northern Hemisphere (1982-2013)
[J].
Coverage-dependent amplifiers of vegetation change on global water cycle dynamics
[J].
Relationships between percent vegetation cover and vegetation indices
[J].
Vegetation coverage change and its response to topography in a typical karst region:the Lianjiang River Basin in Southwest China
[J].
Lightweight unmanned aerial vehicles will revolutionize spatial ecology
[J].
A comparative study of remote sensing classification methods for monitoring and assessing desert vegetation using a UAV-based multispectral sensor
[J].
Improving the estimation of fractional vegetation cover from UAV RGB imagery by colour unmixing
[J].
Estimation of vegetation fraction using RGB and multispectral images from UAV
[J].
New research methods for vegetation information extraction based on visible light remote sensing images from an unmanned aerial vehicle (UAV)
[J].
Fully convolutional networks for sementation
[J].
Deep recurrent neural networks for winter vegetation quality mapping via multitemporal SAR Sentinel-1
[J].
Assessing the accuracy of high resolution digital surface models computed by PhotoScan and MicMac in sub-optimal survey conditions
[J].
An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery based on Structure from Motion (SfM) point clouds
[J].
基于无人机可见光影像的荒漠植被分布格局研究方法
[J].
Estimating and examining the sensitivity of different vegetation indices to fractions of vegetation cover at different scaling grids for early stage acacia plantation forests using a fixed-wing UAS
[J].
UAV remote sensing for urban vegetation mapping using random forest and texture analysis
[J].
Fractional vegetation cover estimation algorithm for Chinese GF-1 wide field view data
[J].
Landscape-level vegetation classification and fractional woody and herbaceous vegetation cover estimation over the dryland ecosystems by unmanned aerial vehicle platform
[J].
Sub-metric analisis of vegetation structure in bog-heathland mosaics using very high resolution rpas imagery
[J].
UAV flight experiments applied to the remote sensing of vegetated areas
[J].
Small Unmanned Aerial Vehicles (Micro-Uavs,Drones) in plant ecology
[J].
Causes for the unimodal pattern of biomass and productivity in alpine grasslands along a large altitudinal gradient in semi‐arid regions
[J].
Spatio-temporal variation of vegetation coverage and its response to climate change in North China plain in the last 33 years
[J].
Spatiotemporal variation in vegetation coverage and its response to climatic factors in the Red River Basin,China
[J].

 甘公网安备 62010202000688号
甘公网安备 62010202000688号
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}