Estimating soil salinity in Pingluo County of China using QuickBird data and soil reflectance spectra
1
2014
... 土壤盐渍化是严重的土地退化问题,全球大部分干旱区的土地面临此挑战[1-4].盐渍土主要包括盐土和碱土,盐土中的NaCl和Na2SO4含量较高,碱土则以苏打(Na2CO3)和小苏打(NaHCO3)为主[5].土壤中的盐分含量过高会破坏植被体内的离子平衡关系,而苏打和小苏打水解会形成NaOH,腐蚀农作物根系,影响土壤的透水性和通气性.这两种类型均不利于植被生长,降低作物产量,影响农业发展和粮食安全.因此,盐渍化防治和盐渍土改良日益成为全球土地退化和农业研究领域重点关注的问题. ...
Soil salinity analysis of Urmia Lake Basin using Landsat-8 OLI and Sentinel-2A based spectral indices and electrical conductivity measurements
0
2020
Critical knowledge gaps and research priorities in global soil salinity
0
2021
Assessing soil salinity using soil salinity and vegetation indices derived from IKONOS high-spatial resolution imageries:applications in a date palm dominated region
2
2014
... 土壤盐渍化是严重的土地退化问题,全球大部分干旱区的土地面临此挑战[1-4].盐渍土主要包括盐土和碱土,盐土中的NaCl和Na2SO4含量较高,碱土则以苏打(Na2CO3)和小苏打(NaHCO3)为主[5].土壤中的盐分含量过高会破坏植被体内的离子平衡关系,而苏打和小苏打水解会形成NaOH,腐蚀农作物根系,影响土壤的透水性和通气性.这两种类型均不利于植被生长,降低作物产量,影响农业发展和粮食安全.因此,盐渍化防治和盐渍土改良日益成为全球土地退化和农业研究领域重点关注的问题. ...
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
Combination of proximal and remote sensing methods for rapid soil salinity quantification
2
2015
... 土壤盐渍化是严重的土地退化问题,全球大部分干旱区的土地面临此挑战[1-4].盐渍土主要包括盐土和碱土,盐土中的NaCl和Na2SO4含量较高,碱土则以苏打(Na2CO3)和小苏打(NaHCO3)为主[5].土壤中的盐分含量过高会破坏植被体内的离子平衡关系,而苏打和小苏打水解会形成NaOH,腐蚀农作物根系,影响土壤的透水性和通气性.这两种类型均不利于植被生长,降低作物产量,影响农业发展和粮食安全.因此,盐渍化防治和盐渍土改良日益成为全球土地退化和农业研究领域重点关注的问题. ...
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
Climate change impacts on soil salinity in agricultural areas
0
2021
Remote sensing of soil salinity:potentials and constraints
0
2003
Evaluating the feasibility of using Sentinel-2 and Sentinel-3 satellites for high-resolution evapotranspiration estimations
1
2019
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
Comparing laboratory and airborne hyperspectral data for the estimation and mapping of topsoil organic carbon:Feature selection coupled with random forest
1
2020
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
Evaluation of the potential of the current and forthcoming multispectral and hyperspectral imagers to estimate soil texture and organic carbon
1
2016
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
Hyperspectral field estimation and remote-sensing inversion of salt content in coastal saline soils of the Yellow River Delta
0
2016
Improving biomass and grain yield prediction of wheat genotypes on sodic soil using integrated high-resolution multispectral,hyperspectral,3d point cloud,and machine learning techniques
0
2021
Relating hyperspectral vegetation indices with soil salinity at different depths for the diagnosis of winter wheat salt stress
0
2021
Sensitivity of clay content prediction to spectral configuration of VNIR/SWIR imaging data,from multispectral to hyperspectral scenarios
1
2018
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
基于CARS算法的不同类型土壤有机质高光谱预测
1
2021
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
基于不同卷积神经网络模型的红壤有机质高光谱估算
1
2021
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
Prediction of soil properties using laboratory VIS-NIR spectroscopy and Hyperion imagery
1
2013
... 遥感数据具有省时、高效和广域的优点,有利于开展快速、适时和高精度的盐渍化遥感监测研究[5-8].遥感数据中的可见光和近红外光谱包含较多土壤属性敏感信息,有利于对土壤属性进行预测研究[9].高光谱数据在光谱信息和光谱分辨率方面具有显著优势,被广泛应用于土壤属性预测研究[10-14].高光谱数据分为地基高光谱、机载高光谱和星载高光谱.地基高光谱主要来源于手持光谱仪,机载高光谱则是将传感器搭载于无人机或直升飞机等飞行器上,星载高光谱则是将传感器搭载于遥感卫星或其他航天器.在黑龙江省海伦市[15]和江西省奉新县北部[16]有机质的预测过程中,高光谱数据发挥了至关重要的作用.手持高光谱数据和Hyperion星载高光谱反射率数据为分析土壤有机质、总磷、pH和阳离子交换容量提供了便利[17]. ...
Estimating soil salinity from remote sensing and terrain data in southern Xinjiang Province,China
2
2019
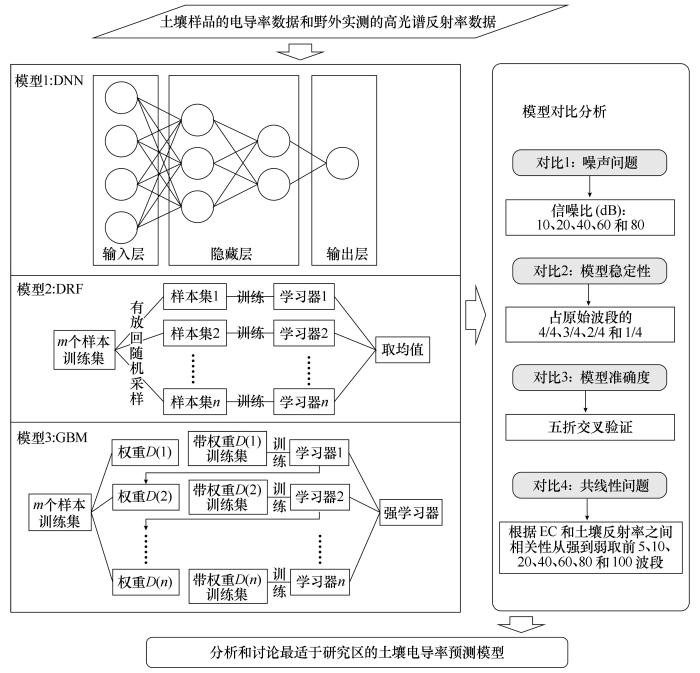
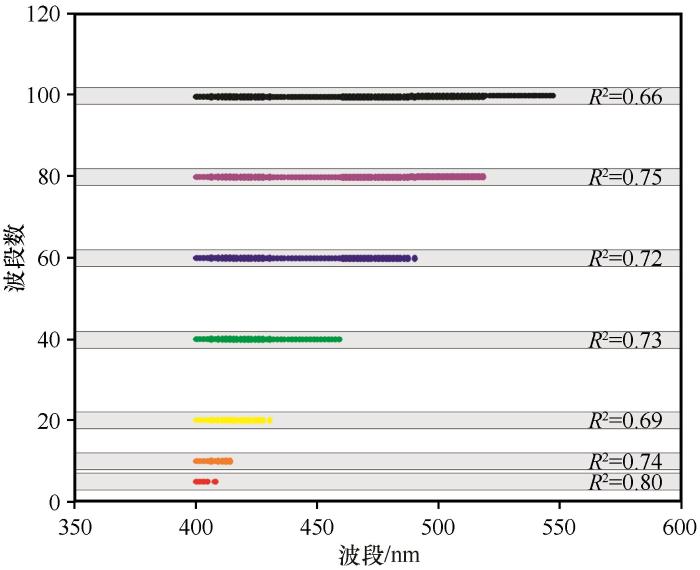
... 基于遥感数据的土壤盐分预测模型有线性模型、机器学习模型和深度学习模型等,大量研究表明机器学习和深度学习模型在处理高维复杂数据方面明显优于线性模型[18-20].机器学习框架整合了多种机器学习方法,兼具数据处理、模型建立和模型评估验证等功能,极大地提高了使用效率.目前已有的机器学习框架包括Apache Singa、MapReduce、H2O、MLlib(Spark)、Scikit-Learn、TensorFlow、GraphLab和Torch等.其中,H2O框架提供了Python、Java、Scala和R语言等多种开发环境,支持多种机器学习算法.但不同机器学习方法在处理数据共线性和噪声问题方面存在差异,模型的稳定性和鲁棒性各不相同.Wang等[21]利用实测光谱数据和土壤盐分数据建立了随机森林回归算法(Random forest regression,RFR)、支持向量机(Support vector regression,SVR)、梯度提升回归树算法(Gradient-boosted regression tree,GBRT)、多层感知机回归算法(Multilayer perceptron regression,MLPR)和最小角回归算法(Least angle regression,Lars),从共线问题、数据噪声、稳定性和准确性4个方面对各模型的土壤盐分反演能力进行评估,发现RFR算法在处理数据共线性和噪声问题方面表现最佳.其他研究使用多层感知机-人工神经网络(Multilayer perceptron-artificial neural network,MLP-ANN)、模型树M5算法(M5 model tree,M5)、分类与回归树(Classification and regression tree,CART)、随机森林(Randon forest,RF)、高斯过程回归(Gaussian processes regression,GPR)、高斯径向基函数核(Gaussian radial basis functions,GRBF)和降低错误率剪枝(Reduced error pruning tree,REPTree)等算法进行土壤盐渍化预测研究,最终发现在精度和稳定性方面最优的算法为RF、M5和GRBF[22]. ...
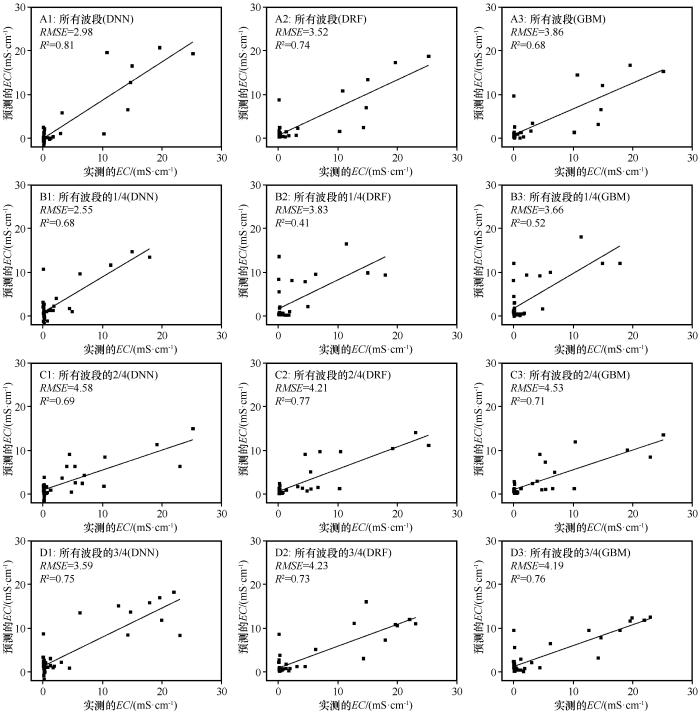
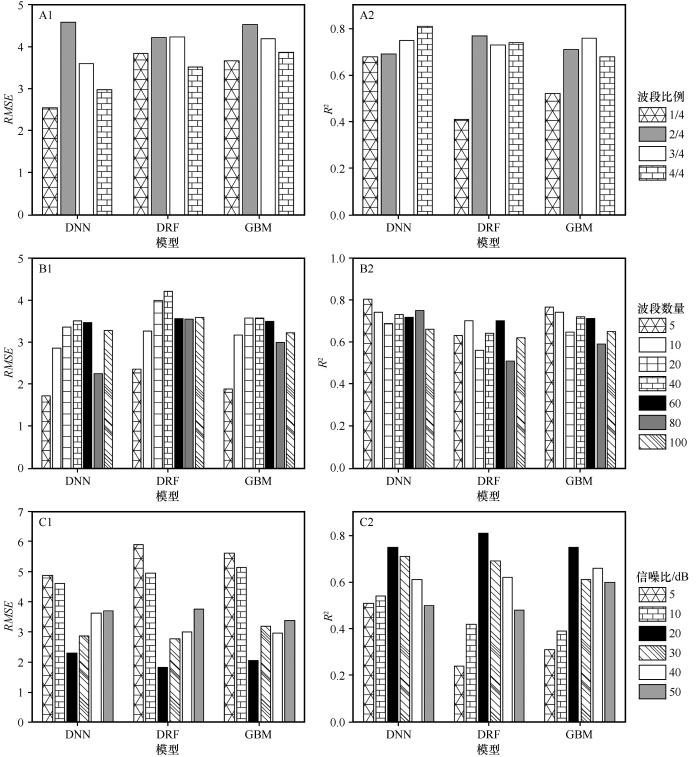
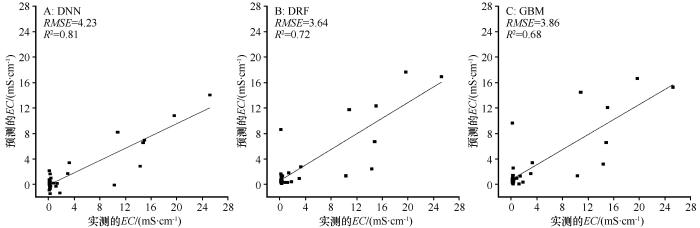
... 星载遥感图像数据与机器学习模型的结合为高精度的盐渍化土壤空间分布研究提供了可能性.Peng等[18]验证了Cubist较PLSR模型在研究区的拟合准确度更高,最终采用Cubist模型和Landsat 8 OLI遥感图像数据对新疆温宿县典型冲积扇的盐渍化土壤空间分布情况开展研究工作.不同算法适用条件存在差异,因而在研究过程中应该因地制宜[22].Garajeh等[59]采用DL-CNN(Deep learning convolutional neural network)研究伊朗中部纳马克湖地区的盐渍化土壤分布情况,证实了神经网络算法在盐渍化土壤研究中的可行性.本研究对比分析了DNN、DRF和GBM算法在景电灌区的适用性,结果表明DNN神经网络算法的准确度和稳定性最优,因此下一步工作可基于遥感图像数据从时间序列和空间分布上深入研究景电灌区的土壤盐渍化状况. ...
Effect of spring irrigation on soil salinity monitoring with UAV-borne multispectral sensor
0
2021
Digital mapping of soil properties using multiple machine learning in a semi-arid region,central Iran
1
2019
... 基于遥感数据的土壤盐分预测模型有线性模型、机器学习模型和深度学习模型等,大量研究表明机器学习和深度学习模型在处理高维复杂数据方面明显优于线性模型[18-20].机器学习框架整合了多种机器学习方法,兼具数据处理、模型建立和模型评估验证等功能,极大地提高了使用效率.目前已有的机器学习框架包括Apache Singa、MapReduce、H2O、MLlib(Spark)、Scikit-Learn、TensorFlow、GraphLab和Torch等.其中,H2O框架提供了Python、Java、Scala和R语言等多种开发环境,支持多种机器学习算法.但不同机器学习方法在处理数据共线性和噪声问题方面存在差异,模型的稳定性和鲁棒性各不相同.Wang等[21]利用实测光谱数据和土壤盐分数据建立了随机森林回归算法(Random forest regression,RFR)、支持向量机(Support vector regression,SVR)、梯度提升回归树算法(Gradient-boosted regression tree,GBRT)、多层感知机回归算法(Multilayer perceptron regression,MLPR)和最小角回归算法(Least angle regression,Lars),从共线问题、数据噪声、稳定性和准确性4个方面对各模型的土壤盐分反演能力进行评估,发现RFR算法在处理数据共线性和噪声问题方面表现最佳.其他研究使用多层感知机-人工神经网络(Multilayer perceptron-artificial neural network,MLP-ANN)、模型树M5算法(M5 model tree,M5)、分类与回归树(Classification and regression tree,CART)、随机森林(Randon forest,RF)、高斯过程回归(Gaussian processes regression,GPR)、高斯径向基函数核(Gaussian radial basis functions,GRBF)和降低错误率剪枝(Reduced error pruning tree,REPTree)等算法进行土壤盐渍化预测研究,最终发现在精度和稳定性方面最优的算法为RF、M5和GRBF[22]. ...
Performance comparison of machine learning algorithms for estimating the soil salinity of salt-affected soil using field spectral data
2
2019
... 基于遥感数据的土壤盐分预测模型有线性模型、机器学习模型和深度学习模型等,大量研究表明机器学习和深度学习模型在处理高维复杂数据方面明显优于线性模型[18-20].机器学习框架整合了多种机器学习方法,兼具数据处理、模型建立和模型评估验证等功能,极大地提高了使用效率.目前已有的机器学习框架包括Apache Singa、MapReduce、H2O、MLlib(Spark)、Scikit-Learn、TensorFlow、GraphLab和Torch等.其中,H2O框架提供了Python、Java、Scala和R语言等多种开发环境,支持多种机器学习算法.但不同机器学习方法在处理数据共线性和噪声问题方面存在差异,模型的稳定性和鲁棒性各不相同.Wang等[21]利用实测光谱数据和土壤盐分数据建立了随机森林回归算法(Random forest regression,RFR)、支持向量机(Support vector regression,SVR)、梯度提升回归树算法(Gradient-boosted regression tree,GBRT)、多层感知机回归算法(Multilayer perceptron regression,MLPR)和最小角回归算法(Least angle regression,Lars),从共线问题、数据噪声、稳定性和准确性4个方面对各模型的土壤盐分反演能力进行评估,发现RFR算法在处理数据共线性和噪声问题方面表现最佳.其他研究使用多层感知机-人工神经网络(Multilayer perceptron-artificial neural network,MLP-ANN)、模型树M5算法(M5 model tree,M5)、分类与回归树(Classification and regression tree,CART)、随机森林(Randon forest,RF)、高斯过程回归(Gaussian processes regression,GPR)、高斯径向基函数核(Gaussian radial basis functions,GRBF)和降低错误率剪枝(Reduced error pruning tree,REPTree)等算法进行土壤盐渍化预测研究,最终发现在精度和稳定性方面最优的算法为RF、M5和GRBF[22]. ...
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Multi-algorithm comparison for predicting soil salinity
4
2020
... 基于遥感数据的土壤盐分预测模型有线性模型、机器学习模型和深度学习模型等,大量研究表明机器学习和深度学习模型在处理高维复杂数据方面明显优于线性模型[18-20].机器学习框架整合了多种机器学习方法,兼具数据处理、模型建立和模型评估验证等功能,极大地提高了使用效率.目前已有的机器学习框架包括Apache Singa、MapReduce、H2O、MLlib(Spark)、Scikit-Learn、TensorFlow、GraphLab和Torch等.其中,H2O框架提供了Python、Java、Scala和R语言等多种开发环境,支持多种机器学习算法.但不同机器学习方法在处理数据共线性和噪声问题方面存在差异,模型的稳定性和鲁棒性各不相同.Wang等[21]利用实测光谱数据和土壤盐分数据建立了随机森林回归算法(Random forest regression,RFR)、支持向量机(Support vector regression,SVR)、梯度提升回归树算法(Gradient-boosted regression tree,GBRT)、多层感知机回归算法(Multilayer perceptron regression,MLPR)和最小角回归算法(Least angle regression,Lars),从共线问题、数据噪声、稳定性和准确性4个方面对各模型的土壤盐分反演能力进行评估,发现RFR算法在处理数据共线性和噪声问题方面表现最佳.其他研究使用多层感知机-人工神经网络(Multilayer perceptron-artificial neural network,MLP-ANN)、模型树M5算法(M5 model tree,M5)、分类与回归树(Classification and regression tree,CART)、随机森林(Randon forest,RF)、高斯过程回归(Gaussian processes regression,GPR)、高斯径向基函数核(Gaussian radial basis functions,GRBF)和降低错误率剪枝(Reduced error pruning tree,REPTree)等算法进行土壤盐渍化预测研究,最终发现在精度和稳定性方面最优的算法为RF、M5和GRBF[22]. ...
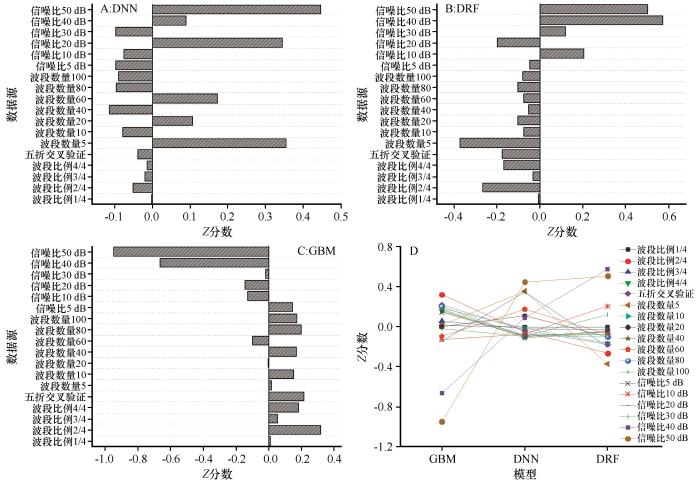
... 本研究采用均方根误差(Root mean square error,RMSE)和决定系数(Coefficient of determination,R2)验证模型的模拟精度.RMSE与模型模拟精度成正比,其数值愈大,模型模拟精度愈高.R2介于0和1之间,1表示模型的拟合结果完全正确,0表示拟合结果完全失真.此外,本研究将各算法的稳定性(Stability,STA)看作校准精度(Calibration accuracy,CAL)与验证精度(Validation accuracy,VAL)之间的差异[22],并采用Z分数验证模型性能. ...
... 式中:Z分数(Standard score)是模型的稳定系数,值越小,模型的稳定性越高[22]. ...
... 星载遥感图像数据与机器学习模型的结合为高精度的盐渍化土壤空间分布研究提供了可能性.Peng等[18]验证了Cubist较PLSR模型在研究区的拟合准确度更高,最终采用Cubist模型和Landsat 8 OLI遥感图像数据对新疆温宿县典型冲积扇的盐渍化土壤空间分布情况开展研究工作.不同算法适用条件存在差异,因而在研究过程中应该因地制宜[22].Garajeh等[59]采用DL-CNN(Deep learning convolutional neural network)研究伊朗中部纳马克湖地区的盐渍化土壤分布情况,证实了神经网络算法在盐渍化土壤研究中的可行性.本研究对比分析了DNN、DRF和GBM算法在景电灌区的适用性,结果表明DNN神经网络算法的准确度和稳定性最优,因此下一步工作可基于遥感图像数据从时间序列和空间分布上深入研究景电灌区的土壤盐渍化状况. ...
Smoothing and differentiation of data by simplified least squares procedures
1
1964
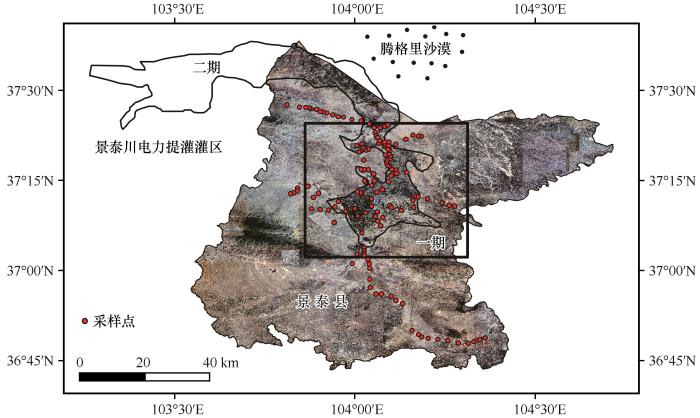
... 西北干旱区冬春时节降水较少,由于缺乏地表径流淋洗,强烈的蒸发作用导致盐分聚集于土壤表层,有利于开展土壤盐分预测研究.因此,本研究土壤样品和高光谱反射率数据的采集时间为2022年3月1—7日,基于五点混合取样法采集0~5 cm的表层土壤样品139个.在采集土壤样品的过程中,同时利用美国SOC公司生产的全光谱便携式地物光谱仪PSR-3500测得土壤反射率.PSR-3500光谱仪的光谱范围为350~2 500 nm,光谱分辨率分别为3.5 nm(350~1 000 nm)、10 nm(1 000~1 900 nm)和7 nm(1 900~2 500 nm);测量时段约为当地时间11:00—15:00;每次测量前使用白板进行校准.我们首先在每个土壤样点的5个子样本点分别采集50条光谱曲线,然后累加求取平均值作为该样点的最终反射率数值.为了消除噪声干扰,本研究删去了噪声影响波段,仅保留400~1 800 nm波段的数据,且在Unscrambler X 10.4软件中对其进行了Savitzky-Golay滤波处理[23]. ...
Characterizing soil salinity at multiple depth using electromagnetic induction and remote sensing data with random forests:a case study in Tarim River Basin of southern Xinjiang,China
1
2021
... 在实验室内处理过程中,首先对土壤样品进行室内阴干处理,剔除大石块、树叶和植被根系;然后采用1 mm的土壤筛对其进行筛分处理,按照1∶5的土水比制备成土壤提取液;最后利用上海仪电科学仪器股份有限公司生产的LEICI DDS-307A电导率仪测得土壤样品的电导率数据.电导率数据是土壤盐分的重要替代性指标,因此本研究采用电导率数据研究土壤盐渍化问题[24]. ...
Regional predictions of eight common soil properties and their spatial structures from hyperspectral Vis-NIR data
1
2012
... H2O机器学习框架使用概率分割方法将输入数据分为训练集和验证集,训练集占3/4,验证集占1/4,因此139个样品中104个样品为训练集,35个样品为验证集.全部样品的平均值、中位数、标准差和变异系数均介于训练集和验证集之间.土壤样品的变异系数均高于1,说明该区的土壤样品电导率变异程度偏高(表1).土壤属性数据之间的差异较大有利于采用模型进行回归预测[25]. ...
Global mapping of soil salinity change
1
2019
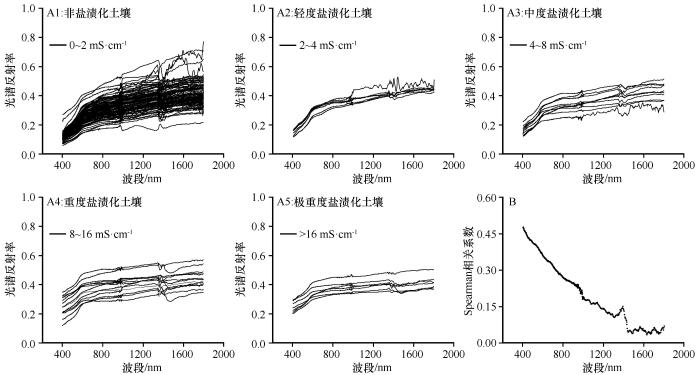
... 本研究参考前人的盐渍化程度分级标准[26]对土壤进行分级,景电灌区不少非盐渍化、轻度盐渍化和中度盐渍化土壤的光谱反射率低于0.4,而不少重度和极重度盐渍化土壤的光谱反射率高于0.4(图3).在景电灌区的野外考察中,我们发现盐渍化程度愈重的区域颜色愈浅.通常情况下,土壤盐渍化程度越重,地表盐分含量越高,光谱反射率越强[27].土壤是一个较为复杂的系统,土壤的粒径越粗,光谱反射率越强;土壤湿度越大,颜色越深,光谱反射率越弱;土壤有机质含量越高,颜色同样越深,光谱反射率越弱.诸多因素导致景电灌区的光谱反射率和电导率之间并未存在显著的正相关关系.由于水分吸收的影响,土壤样品的光谱曲线在1 400 nm处出现了吸收谷[28].土壤电导率和高光谱反射率之间的Spearman相关性系数显示,随着波长的增加,二者之间的相关系数波动降低,这说明可见光和近红外波段包含的土壤敏感信息更为丰富. ...
Spectral behaviour of salt-affected soils
1
1995
... 本研究参考前人的盐渍化程度分级标准[26]对土壤进行分级,景电灌区不少非盐渍化、轻度盐渍化和中度盐渍化土壤的光谱反射率低于0.4,而不少重度和极重度盐渍化土壤的光谱反射率高于0.4(图3).在景电灌区的野外考察中,我们发现盐渍化程度愈重的区域颜色愈浅.通常情况下,土壤盐渍化程度越重,地表盐分含量越高,光谱反射率越强[27].土壤是一个较为复杂的系统,土壤的粒径越粗,光谱反射率越强;土壤湿度越大,颜色越深,光谱反射率越弱;土壤有机质含量越高,颜色同样越深,光谱反射率越弱.诸多因素导致景电灌区的光谱反射率和电导率之间并未存在显著的正相关关系.由于水分吸收的影响,土壤样品的光谱曲线在1 400 nm处出现了吸收谷[28].土壤电导率和高光谱反射率之间的Spearman相关性系数显示,随着波长的增加,二者之间的相关系数波动降低,这说明可见光和近红外波段包含的土壤敏感信息更为丰富. ...
Spectrophotometric determination of soil-water content
1
1972
... 本研究参考前人的盐渍化程度分级标准[26]对土壤进行分级,景电灌区不少非盐渍化、轻度盐渍化和中度盐渍化土壤的光谱反射率低于0.4,而不少重度和极重度盐渍化土壤的光谱反射率高于0.4(图3).在景电灌区的野外考察中,我们发现盐渍化程度愈重的区域颜色愈浅.通常情况下,土壤盐渍化程度越重,地表盐分含量越高,光谱反射率越强[27].土壤是一个较为复杂的系统,土壤的粒径越粗,光谱反射率越强;土壤湿度越大,颜色越深,光谱反射率越弱;土壤有机质含量越高,颜色同样越深,光谱反射率越弱.诸多因素导致景电灌区的光谱反射率和电导率之间并未存在显著的正相关关系.由于水分吸收的影响,土壤样品的光谱曲线在1 400 nm处出现了吸收谷[28].土壤电导率和高光谱反射率之间的Spearman相关性系数显示,随着波长的增加,二者之间的相关系数波动降低,这说明可见光和近红外波段包含的土壤敏感信息更为丰富. ...
Comparison of physically-based and empirical methods for retrieval of LAI and FAPAR over specific and generic crops using Landsat-8 data
2
2017
... 本文证实DNN算法在盐渍化研究方面的预测精度最优,模型的稳定性、鲁棒性、处理共线性问题和噪声问题的能力较DRF和GBM好.深度学习算法被广泛应用于环境因子预测研究,是机器学习的进一步发展,为机器学习的分支[29-34],DNN是深度学习算法中的一种,起源于人工神经网络.Zhang等[35]采用LOR(Logistic regression)、RFR、SVR(Support vector regression)、DTR(Decision tree regression)、MPR(Multilayer perceptron regression)和DNN算法对中国东北吉林大安市土壤盐渍化进行研究,结果表明DNN神经网络算法表现最佳,因为神经网络算法善于深入地学习抽象信息.Farifteh等[36]对比分析了PLSR和ANN在欧洲荷兰和匈牙利盐渍化土壤研究中的适用性,发现ANN神经网络算法的模拟精度高于PLSR. ...
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Artificial neural network to predict leaf population chlorophyll content from cotton plant images
1
2010
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Neural-network model for estimating leaf chlorophyll concentration in rice under stress from heavy metals using four spectral indices
0
2010
Non-destructive estimation of foliar chlorophyll and carotenoid contents:focus on informative spectral bands
0
2015
Inversion of radiative transfer model for retrieval of wheat biophysical parameters from broadband reflectance measurements
0
2016
Machine learning regression algorithms for biophysical parameter retrieval:opportunities for Sentinel-2 and-3
1
2012
... 本文证实DNN算法在盐渍化研究方面的预测精度最优,模型的稳定性、鲁棒性、处理共线性问题和噪声问题的能力较DRF和GBM好.深度学习算法被广泛应用于环境因子预测研究,是机器学习的进一步发展,为机器学习的分支[29-34],DNN是深度学习算法中的一种,起源于人工神经网络.Zhang等[35]采用LOR(Logistic regression)、RFR、SVR(Support vector regression)、DTR(Decision tree regression)、MPR(Multilayer perceptron regression)和DNN算法对中国东北吉林大安市土壤盐渍化进行研究,结果表明DNN神经网络算法表现最佳,因为神经网络算法善于深入地学习抽象信息.Farifteh等[36]对比分析了PLSR和ANN在欧洲荷兰和匈牙利盐渍化土壤研究中的适用性,发现ANN神经网络算法的模拟精度高于PLSR. ...
Retrieval of the soil salinity from Sentinel-1 dual-polarized sar data based on deep neural network regression
1
2022
... 本文证实DNN算法在盐渍化研究方面的预测精度最优,模型的稳定性、鲁棒性、处理共线性问题和噪声问题的能力较DRF和GBM好.深度学习算法被广泛应用于环境因子预测研究,是机器学习的进一步发展,为机器学习的分支[29-34],DNN是深度学习算法中的一种,起源于人工神经网络.Zhang等[35]采用LOR(Logistic regression)、RFR、SVR(Support vector regression)、DTR(Decision tree regression)、MPR(Multilayer perceptron regression)和DNN算法对中国东北吉林大安市土壤盐渍化进行研究,结果表明DNN神经网络算法表现最佳,因为神经网络算法善于深入地学习抽象信息.Farifteh等[36]对比分析了PLSR和ANN在欧洲荷兰和匈牙利盐渍化土壤研究中的适用性,发现ANN神经网络算法的模拟精度高于PLSR. ...
Quantitative analysis of salt-affected soil reflectance spectra:a comparison of two adaptive methods (PLSR and ANN)
1
2007
... 本文证实DNN算法在盐渍化研究方面的预测精度最优,模型的稳定性、鲁棒性、处理共线性问题和噪声问题的能力较DRF和GBM好.深度学习算法被广泛应用于环境因子预测研究,是机器学习的进一步发展,为机器学习的分支[29-34],DNN是深度学习算法中的一种,起源于人工神经网络.Zhang等[35]采用LOR(Logistic regression)、RFR、SVR(Support vector regression)、DTR(Decision tree regression)、MPR(Multilayer perceptron regression)和DNN算法对中国东北吉林大安市土壤盐渍化进行研究,结果表明DNN神经网络算法表现最佳,因为神经网络算法善于深入地学习抽象信息.Farifteh等[36]对比分析了PLSR和ANN在欧洲荷兰和匈牙利盐渍化土壤研究中的适用性,发现ANN神经网络算法的模拟精度高于PLSR. ...
Comparison between random forest and gradient boosting machine methods for predicting Listeria spp.prevalence in the environment of pastured poultry farms
1
2019
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Investigating the use of gradient boosting machine,random forest and their ensemble to predict skin flavonoid content from berry physical-mechanical characteristics in wine grapes
1
2015
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Random forest in remote sensing:a review of applications and future directions
1
2016
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Random forests
1
2001
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Stochastic gradient boosting
2
2002
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
... [41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Random forests for classification in ecology
1
2007
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
An assessment of the effectiveness of a random forest classifier for land-cover classification
0
2012
Land-cover classification of coastal wetlands using the RF algorithm for Worldview-2 and Landsat 8 images
1
2019
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Global sea surface salinity via the synergistic use of SMAP satellite and HYCOM data based on machine learning
1
2022
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Comparison between random forests,artificial neural networks and gradient boosted machines methods of on-line VIS-NIR spectroscopy measurements of soil total nitrogen and total carbon
1
2017
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Monitoring organic carbon,total nitrogen,and pH for reclaimed soils using field reflectance spectroscopy
1
2017
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Enhanced burn severity estimation using fine resolution ET and MESMA fraction images with machine learning algorithm
1
2020
... 本文的DRF和GBM模型在稳定性、共线性问题、噪声问题和模拟准确度方面较为接近.其他研究证实了这一结论[37].RF和GBM被广泛应用于各项土壤指标的预测研究[38-39],二者的提出人分别为Breiman[40]和Friedman[41].RF和GBM均属于集成学习算法,这类算法是采用结合器对多个估计器进行整合,综合了单个估计器的优势,能够提升模型的鲁棒性.目前已有的集成学习算法主要包括基于Bagging或基于Boosting的算法.Bagging算法使用有放回的自助随机均匀取样法生成多个训练数据集,基于此训练多个模型,最后计算模型结果的均值作为预测结果.RF对Bagging算法进行了扩展,以CART为基学习器,且RF将随机特征应用至训练过程.RF基于大量决策树进行回归,有利于防止出现单棵决策树的过拟合问题,具有训练时间短和鲁棒性强的优点[42-44].Boosting算法是根据错误率非随机取样.与Bagging算法不同,Boosting算法的各个预测函数必须按顺序生成,且函数之间有权重[41].GBM算法基于损失函数的梯度下降方向建模.部分研究发现GBM的模拟结果较RF更优[29-30].Jang等[45]通过2010年以来的L波段微波遥感图像以及KNN(K-nearest neighbor)、ANN、RF、XGBoost(Extreme gradient boost)、LightGBM(Light gradient boosting model)和GBRT等7种机器学习方法监测海洋表面含盐量,其中GBRT表现最佳.其他研究认为RF的模拟结果更优[46-47].Quintano等[48]采用RF算法研究葡萄牙中部的火灾后地表的烧伤严重程度,取得了较好的结果.Wang等[21]对比分析了RFR、SVR、GBRT、MLPR和Lars,发现RFR在处理共线性问题和噪声问题方面效果更佳.因此,不同模型的适用区域和适用条件存在差异,在选择模型的时候应综合考虑区域异质性和数据源的适用性. ...
Using hyperspectral vegetation indices as a proxy to monitor soil salinity
1
2011
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
Using imaging spectroscopy to study soil properties
1
2009
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
Using data mining to model and interpret soil diffuse reflectance spectra
1
2010
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
Using a digital camera to measure soil organic carbon and iron contents
1
2008
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
Identifying optimal spectral bands to assess soil properties with VNIR radiometry in semi-arid soils
1
2008
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
基于地表光谱建模的区域土壤盐渍化遥感监测研究
1
2016
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
Moisture effects on soil reflectance
1
2002
... 本研究中可见光和近红外高光谱反射率数据与电导率之间的相关性明显高于短波红外,这或许是土壤化学物质与高光谱数据极高光谱分辨率综合作用的结果.已有研究表明红光和近红外光谱区域与盐胁迫和地壳中形成的土壤矿物质的鉴定有关[4,49].土壤中的黏土、粉砂和有机碳等的敏感波段位于1 900~2 400 nm,这些重要的土壤参数在短波红外光谱区具有吸收特征[50-51].然而其他研究发现400~600 nm光谱波段在土壤化学元素和有机碳预测模型中具有较高的重要性[52-53].王爽等[54]对新疆渭干河-库车河绿洲土壤盐渍化进行研究,发现盐渍化土壤的敏感波段主要位于可见光和近红外光谱范围(462、828、1 221 nm和2 016 nm).传感器的噪声通常会随着光谱分辨率的增加而增加,增高光谱分辨率可能导致低信噪比,尤其是短波红外光谱区域[55].因而可见光和近红外光谱波段包含的土壤信息较短波红外丰富,这与本研究的结论相符. ...
Prediction of soil organic carbon stock by laboratory spectral data and airborne hyperspectral images
1
2019
... 野外实测高光谱数据能够提供土壤点数据,可采用空间插值法对土壤属性数据进行空间大尺度反演[56-57].Ding等[58]基于Landsat数据采用泛克里金(Universal kriging)、光谱指数回归(Spectral index regression)和回归克里金(Regression kriging)建立了渭干河-库车河绿洲干湿两季的盐浓度分布模式,其中回归克里金的结果最准确.因此未来可以尝试采用回归克里金方法获得景电灌区的盐渍化土壤时空分布数据. ...
Detecting soil salinization in arid regions using spectral feature space derived from remote sensing data
1
2014
... 野外实测高光谱数据能够提供土壤点数据,可采用空间插值法对土壤属性数据进行空间大尺度反演[56-57].Ding等[58]基于Landsat数据采用泛克里金(Universal kriging)、光谱指数回归(Spectral index regression)和回归克里金(Regression kriging)建立了渭干河-库车河绿洲干湿两季的盐浓度分布模式,其中回归克里金的结果最准确.因此未来可以尝试采用回归克里金方法获得景电灌区的盐渍化土壤时空分布数据. ...
Monitoring and evaluating spatial variability of soil salinity in dry and wet seasons in the Werigan-Kuqa Oasis,China,using remote sensing and electromagnetic induction instruments
1
2014
... 野外实测高光谱数据能够提供土壤点数据,可采用空间插值法对土壤属性数据进行空间大尺度反演[56-57].Ding等[58]基于Landsat数据采用泛克里金(Universal kriging)、光谱指数回归(Spectral index regression)和回归克里金(Regression kriging)建立了渭干河-库车河绿洲干湿两季的盐浓度分布模式,其中回归克里金的结果最准确.因此未来可以尝试采用回归克里金方法获得景电灌区的盐渍化土壤时空分布数据. ...
A comparison between Sentinel-2 and Landsat 8 OLI satellite images for soil salinity distribution mapping using a deep learning convolutional neural network
1
2022
... 星载遥感图像数据与机器学习模型的结合为高精度的盐渍化土壤空间分布研究提供了可能性.Peng等[18]验证了Cubist较PLSR模型在研究区的拟合准确度更高,最终采用Cubist模型和Landsat 8 OLI遥感图像数据对新疆温宿县典型冲积扇的盐渍化土壤空间分布情况开展研究工作.不同算法适用条件存在差异,因而在研究过程中应该因地制宜[22].Garajeh等[59]采用DL-CNN(Deep learning convolutional neural network)研究伊朗中部纳马克湖地区的盐渍化土壤分布情况,证实了神经网络算法在盐渍化土壤研究中的可行性.本研究对比分析了DNN、DRF和GBM算法在景电灌区的适用性,结果表明DNN神经网络算法的准确度和稳定性最优,因此下一步工作可基于遥感图像数据从时间序列和空间分布上深入研究景电灌区的土壤盐渍化状况. ...




 甘公网安备 62010202000688号
甘公网安备 62010202000688号
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}