


0 引言
灌木作为干旱-半干旱荒漠地区的优势植被类型,自然生长状态下会对环境变化做出响应,其生长分布状况可在一定程度上反映自然情况[14],如土壤信息和水分信息等。因此,对典型荒漠植被种群的生长分布和群落关系的研究对于揭示荒漠地区的植被生态情况具有重要意义。本研究以无人机可见光影像为基础,通过植被识别与分类,提取不同灌木类型的分布图,并将其进一步应用于植被多尺度样方调查和点格局分析过程,以期为大范围荒漠植被调查和植被分布格局分析提供一套流程更高效、结果更具代表性的研究方法。
1 数据与方法
1.1 研究区域概况
研究区域位于内蒙古自治区巴彦淖尔市(40°13′—42°28′N,105°12′—109°53′E)阴山山脉以北的荒漠草原地区,地势较为平坦(图1)。巴彦淖尔属于典型中温带大陆性季风气候,年均气温约9.5 ℃,年降雨量约115 mm,年蒸发量为2 032~3 179 mm。该地区植被受气候与地形条件的影响,类型复杂。自然生长的植被属于草原植被和荒漠植被两个植物地理区,以旱生植物为主,表现出明显的纬度及经度地带性。
图1
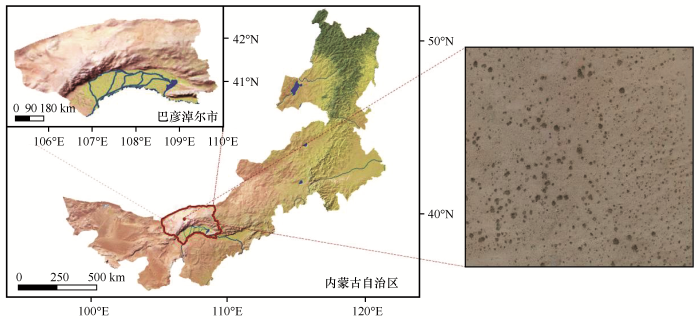
图1
研究区的地理位置及1万m2样地无人机正射拼接影像
Fig.1
Location and the 1×104 m2 UAV orthographic mosaic image of the study area
1.2 无人机图像获取
无人机野外飞行实验采用大疆Phantom 4 pro型无人机,获取的影像为RGB(red-green-blue)可见光影像,单张影像宽高比为3∶2,最大分辨率为5 472×3 468像素。无人机内置GPS/GLONASS双模卫星定位系统及双惯性测量单元(IMU),以实时获取和控制飞行位置及姿态。飞行拍摄过程采用自动巡航模式垂直拍摄,在飞行前设置好自动巡航的区域及路线。每张图像拍摄的快门速度为1/500秒,ISO为100,光圈设定为自动调整以应对意外光线变化的情况。利用Altizure(v2.4.3)软件进行飞行参数规划,对同一区域进行5次相同路线的飞行,唯一不同为镜头方向,包括正射及沿航向前、后、左、右各45°共5个不同方向,获取倾斜角度影像以期更为精准地进行模型建立及植被信息提取。飞行覆盖面积为1.44×104 m2(120.39 m×119.76 m)。航向重叠率和旁向重叠率是决定后期正射影像拼接质量和工作量的关键因素[18],已规划5遍相同航线飞行任务,因此将航向重叠率设定为60%,旁向重叠率设定为50%。拍摄日期处于一年中植被的生长季,当天天气晴朗,实验区域海拔较高且地势空旷。无人机野外飞行及获取的图像主要参数如表1所示。
表1 无人机飞行设定及图像参数
Table 1
| 飞行设定内容 | 参数 | 获取图像内容 | 参数 |
|---|---|---|---|
| 飞行速度 | 2~3 m·s-1 | 原始图像数量 | 1 650张 |
| 拍摄间隔 | 2 s | 图像分辨率 | 72 dpi |
| 飞行高度 | 约10 m | 图像格式 | JPEG |
| 航线数量 | 15 | 拍摄日期 | 2018年7月11日 |
| 航点数量 | 30 | 拍摄时间 | 12:40—14:00 |
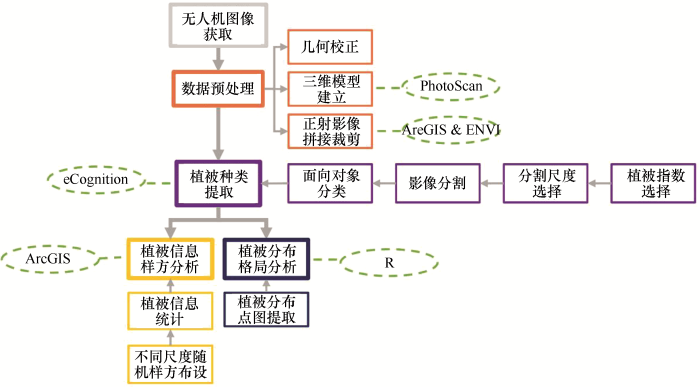
1.3 方法流程与图像预处理
基于无人机可见光影像的荒漠植被分布格局研究方法流程主要包括图像预处理、植被分类提取、植被信息样方分析和植被分布点格局分析4部分(图2)。将挑选出的无人机可见光原始影像导入PhotoScan(Agisoft,v1.4.3)影像处理平台。经通道校正及格式转换后进行空中三角测量,自动对多张影像进行匹配和拼接,结合无人机飞控系统记录的GPS坐标及惯导姿态参数,采用SfM(Structure from Motion)算法实现3D(3-dimensional)点云重建,并利用同名像点匹配得到的影像深度信息消除地形起伏误差进行影像纠正[19]。根据生成的密集点云模型,建立数字高程模型(Digital Elevation Model,DEM)后生成正射影像(Digital Orthophoto Map,DOM),本研究方法即基于研究样地DOM进行计算与分析。因所拍摄原始影像的空间分辨率很高,直接生成整个研究区域的正射影像会导致服务器内存严重不足,因此选择按区块方式生成正射影像。将得到的区块正射影像利用ENVI(v5.3)软件平台按直方图影像匹配方式进行影像匹配后拼接为整个研究区域的正射影像,拼接后的影像分辨率为0.4 cm,适于进行不同种类植被分类。根据分辨率及分析需要,利用感兴趣区(ROI, region of interest)将整幅正射影像所覆盖区域裁剪为1×104 m2(100 m×100 m)的研究区域(图1),以供后续植被分类及特征信息提取研究。
图2
2 结果与分析
2.1 面向对象植被分类
面向对象分类方法中基本的处理单元是由图像分割所得到的对象,而非基于像素的单个像元,使得地物空间和几何信息能够被有效地利用起来。面向对象分类过程利用遥感图像分类领域应用较为成熟的eCognition(v8.9)软件平台实现。为研究不同种类荒漠灌木的数量、密度等信息及空间分布格局情况,将研究区域内的地物按沙冬青、霸王和土壤进行分类,以得到沙冬青单一种群、霸王单一种群及沙冬青+霸王两种群的植被分布图。
2.1.1 图像分割
在面向对象的分类方法中,分割过程对后续分类步骤起到关键作用,主要涉及分割尺度、波段权重和均质性因子3个参数。将无人机影像的红、绿、蓝三波段的权重设置为1∶1∶1。均质性因子包括色彩因子与形状因子,其中色彩因子+形状因子=1,形状因子包括光滑度与紧密度,二者加和也为1。无人机影像分辨率通常较高,光谱数据是影像数据中所包含的主要信息[20],因此可将颜色因子权重设置相对较大。同时形状因子有助于对象形状的完整性,形状因子中的光滑度用于完善具有光滑边界的对象,紧密度因子根据较小的差别将紧凑与不紧凑的目标区分开。
利用ESP(estimation of scale parameters)工具进行分割尺度的预估计算[21],变化率的峰值代表不同类型地物可能存在的最佳分割尺度。选取10 m×10 m的小面积区域进行分割指标预实验。ESP预估结果表明,分割尺度在230~240和450时有两个较为明显的峰值。根据计算结果进行分割尺度的初步选择。保持色彩因子为0.9,紧密度为0.3不变时,探讨不同分割尺度下地物的分割效果(图3)。当分割尺度为240时植被均被较好地分割开来,混淆现象较少,地上的微小杂草未被分割开来,仍与土壤斑块结合在一起,因此选定240作为基础分割尺度。保持分割尺度为240不变,探讨不同色彩因子和紧密度所对应的植被分割效果(图4)。当色彩因子为0.9,紧密度为0.3时,灌木边缘清晰,斑块大小适中,分割效果较好。因此可以将选定的分割尺度和均质性因子指标应用于整块样地的分割过程。
图3
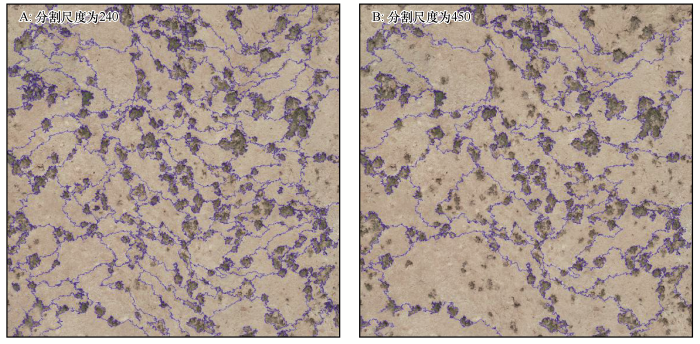
图3
不同分割尺度的对比
Fig.3
Comparison of the segmentations with different scale parameter
图4

图4
不同均质性因子分割效果对比
Fig.4
Comparison of the segmentations with different color and compactness parameter
2.1.2 荒漠植被特征提取与分类
面向对象分类的另一优势是可以利用多维特征指标作为因子进行分类比较,如光谱信息、纹理信息等。利用光谱值、亮度值和植被指数作为分类的特征指标,圈取一定数量的感兴趣区域作为训练集,应用最邻近分类(Nearest Neighbor,NN)算法进行图像分类[22]。
选取红、绿、蓝三波段的光谱值、亮度值和6种常用可见光植被指数,共十维特征指标作为备选分类指标。为减小植被指数的数量级,将可见光波段进行归一化处理(
表2 6种可见光波段的植被指数
Table 2
| 植被指数 | 名称 | 公式 |
|---|---|---|
| CIVE | 植被颜色指数 | |
| ExG | 超绿指数 | |
| ExGR | 超绿超红差分指数 | |
| NGRDI | 归一化绿红差分指数 | |
| VEG | 植被因子 | |
| WI | Woebbecke指数 |
通常选取的特征越多信息越丰富,分类精度越高。但特征指标过多会造成信息冗余,因此在创建特征指标并圈取一定数量感兴趣区制作训练集后需进行特征优化,计算出不同特征指标的贡献值,以找到分类的最佳特征空间组合。分离度与地物的可分离性呈正相关关系,因此可将分离度最高时所对应的特征空间组合作为分类规则指标。对红、绿、蓝三波段的光谱值、亮度值和6种常用可见光植被指数进行特征空间组合的分离度计算。图5所示为每一特征空间组合数量对应的最大组合分离度,如一维特征组合选用红色波段光谱值时可达最大分离度为3.59;二维特征组合选用红色波段光谱值和亮度值时可达最大分离度为4.76,三维特征组合选用红色波段光谱值、亮度值和ExG时可达最大分离度为5.62。结果表明,当选用红、绿、蓝三波段光谱值、亮度值、ExG、CIVE和VEG这七维特征指标组合时分离度最大,可达7.79,因此将此七维指标应用于后续的分类流程。
图5
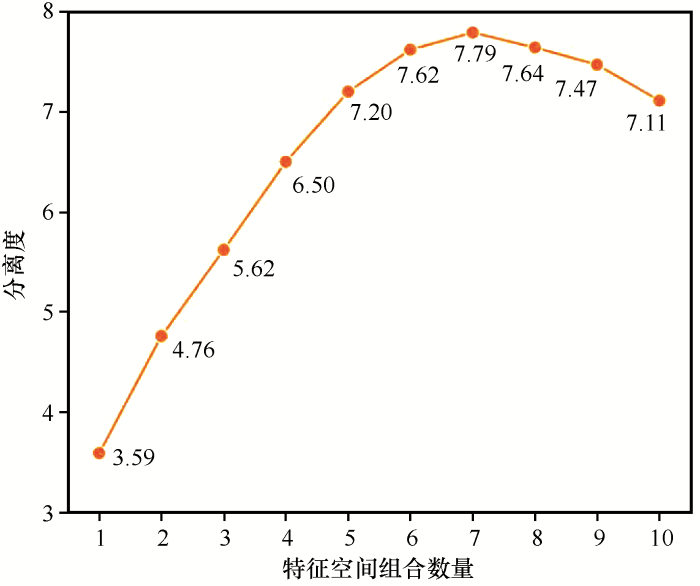
图5
不同特征空间组合分离度对比
Fig.5
Comparison of the separation degrees under the condition of different spatial feature combinations
建立分类规则后执行最邻近分类,初始平均分类精度沙冬青种群为82.8%,霸王种群为84.3%,检查分类后的图像,为保证植被信息统计的准确性,将错分的对象进行目视手动修正。为分类后的图像(图6,粉色斑块为沙冬青植株,绿色小斑块为霸王植株,白色部分为土壤背景)添加分类时所选用的光谱数值、植被指数以及像素面积等特征指标,使得图像附带有植被指数值和面积等信息,以矢量格式输出后进行数据统计分析。
图6
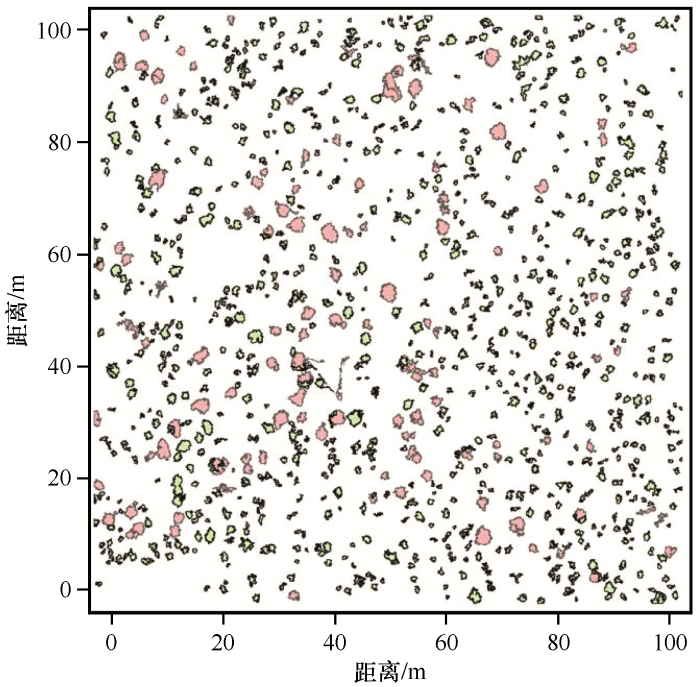
图6
沙冬青-霸王群落中沙冬青和霸王两个种群的空间分布格局(粉色斑块为沙冬青植株,绿色小斑块为霸王植株,白色部分为土壤)
Fig.6
Spatial distribution pattern of A. mongolicus and Z. xanthoxylon populations in a typical desert plant community, where pink patch represents plant individual of A. mongolicus, green patch represents plant individual of Z. xanthoxylon, and the white area represents background soil
2.2 基于随机样方统计实现植被调查
2.2.1 样方法统计结果验证
植被分布矢量图中每株植株均为单一对象,且各自带有编号与面积等特征信息。基于ArcGIS(v10.6)软件平台,利用制作矢量多边形(polygon)掩膜的方式,模拟地面随机样方的布设。根据样方尺度的不同,设置不同边长长度及不同数量的矢量掩膜文件。因此,本方法中样方尺度及数量可根据后期分析需要进行设置。利用制作好的掩膜文件对植被分布矢量图进行矢量裁剪。裁剪过程中对每个模拟样方进行自动编号,同时植被分布图中每个样方内包含的植株同时带有模拟样方的编号及其原来编号。可通过统计相同模拟样方编号的植株数来计算其数量、面积等信息。分别对分类后的沙冬青及霸王矢量图进行随机样方的布设与统计,以分析不同灌木种群的分布情况。
首先对本研究中基于无人机图像分类得到的植被分布矢量图应用样方法的统计结果精度进行验证,判断其是否可以大规模应用于植被信息的调查统计。利用ArcGIS软件,在样地的正射影像和分类后的植被分布矢量图上再叠加布设30个6 m×6 m的随机样方,正射影像空间分辨率很高且植株清晰可辨,因此将目视手动计数的正射影像中每个样方内的植株数量作为真实值。同时,计数每个样方内植被分布矢量图中的植株数量,以验证经本方法分类提取得到的植株数量的准确度。在30个样方内再随机选取10个样方,完全统计10个样方内共40株植株的单株面积。将目视手动圈取测量的植株面积作为真实值,验证利用植被分布矢量图得到的植株面积的结果精度。同时,再手动测量出单株植株的东西冠幅直径l和南北冠幅直径w,验证利用传统地面冠幅法(冠幅面积C=π(l/2)(w/2))[26]求得的植株面积的准确度。
通过植株数量及植株面积的精度验证(图7)发现,利用植被分布矢量图计算得到的植株数量和面积结果具有较好的统计精度。植株数量验证中,决定系数R2为0.886,均方根误差RMSE为0.560,有5个样方中的植株数量出现了±1株的偏差,1个样方中出现了+2株的偏差,计算精度较高。经植被分布矢量图计算得到的植株面积结果验证中,R2为0.967,RMSE为0.096,大部分结果均接近于手动圈取的真实值,计算精度很高。手动圈取测量植株面积时圈取方式相对一致且紧贴植株边界,而图像分类后得到的植株斑块边缘通常比实际植株边缘稍凸出,因此应用无人机图像分类法求得的植株面积值稍大于手动圈取的真实值。测量植株的东西和南北冠幅直径后求得的植株面积结果验证中,R2为0.869,RMSE为0.113,大部分结果比手动圈取的真实值较小。由此,本研究中利用无人机图像分类提取后的植被分布矢量图进行植被数量和面积的统计结果精度较高,可以进行更为深入的基于植株数量和植株面积的植被调查研究。
图7
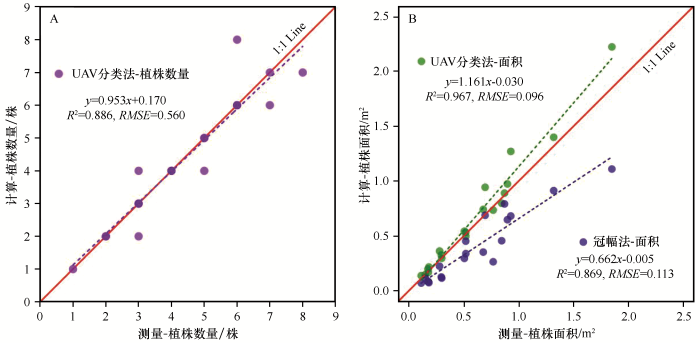
图7
植株数量及植株面积精度验证
Fig.7
Accuracy verification of the plant number and the canopy area of plant
2.2.2 多尺度随机样方布设
在对植被种群进行样方统计研究时,以布设100个尺度为6 m×6 m的随机样方为例(图8),所设置的样方尺度、数量和位置保持一致,分别对沙冬青和霸王种群进行取样调查,模拟传统的地面样方调查方式。同时,还可以根据研究需要进行更大尺度和相应数量随机样方的布设。分别对每个样方内的植被信息进行数据统计,根据每个样方内的植株数量、面积可计算出不同样方尺度下、不同植被种类的密度和覆盖度等指标。其中,可通过计数每个样方中的个体数来求得每个样方的植被密度,各样方的植被密度平均值可作为该种群或研究区域的植被密度;同样计算出每个样方中的植被面积和与样方面积相除可得单样方内的植被覆盖度,各样方的覆盖度平均值可作为该研究区域的植被覆盖度。冠幅指标可将植株近似为圆形后利用单株植被面积值计算得到。
图8
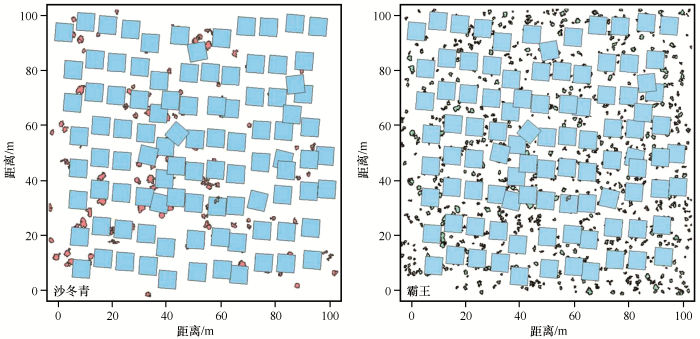
图8
沙冬青及霸王种群随机样方布置
Fig.8
Layout of the random quadrats of A. mongolicus and Z. xanthoxylon populations
2.2.3 植被种群结构特征调查
通过此方法流程得到的大量数据可利用统计工具(如Python,Excel)以不同方式呈现,如分别研究各样方内的多种指标信息或整体研究样地内所有植株的同一指标信息,进而从不同角度解释说明植被分布情况与生长特征。如,图9为研究区域内所有霸王植株面积按0~1、1~2、2~3、3~4 m2的等级分布统计,同时将各植株近似为圆并求得所有霸王植株冠幅按I~VIII级的等级分布统计(I级为0~30 cm,II级为30~60 cm,III级为60~90 cm,IV级为90~120 cm,V级为120~150 cm,VI级为150~180 cm,VII级为180~210 cm,VIII级为210~240 cm),从而可以从植株面积、冠幅等种群结构角度进行种群生长分布状态的深入分析。同时,通过布设不同边长与不同数量的样方,可实现多尺度样方调查分析,有效扩大了样方法分析的尺度与范围,使得指标结果更加具有代表性且更加接近植被真实分布情况。
图9
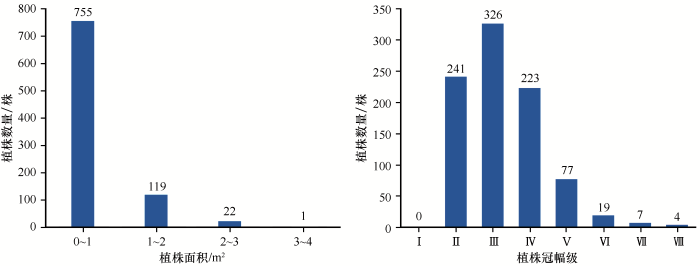
图9
霸王植株的冠幅面积与冠幅级结构
Fig.9
Canopy area and its width structure of Z. xanthoxylon population
2.3 提取植被位置信息实现点格局分析
基于ArcGIS软件平台,为分类后得到的植被分布矢量图添加地理坐标系,进行校正后提取每株植株的点坐标信息,将带有点坐标信息及面积等特征信息的植被分布矢量图以文本格式导出。整理后利用R(v3.5.3)语言平台进行读取并显示,转化为R语言所需的点模式图。如图10所示,绿色实心圆为沙冬青植株点,蓝色空心圆为霸王植株点。继而可利用点格局分析函数,如Ripley K(r)相关的L(r)函数和g(r)函数等进行荒漠植被的点格局分析。进一步探讨沙冬青和霸王种群内部和种间的相互作用与关系,分析环境对种群生存和生长的影响。
图10

图10
沙冬青+霸王种群点格局分布图(图中的绿色实心圆为沙冬青植株,蓝色空心圆为霸王植株)
Fig.10
Point pattern distribution
3 讨论
当研究目的不需分析植被种属时,如只区分植被与非植被地物,Phantom 4 pro型无人机飞行高度100 m,飞行速度8 m·s-1时,覆盖1.45×106 m2研究区域仅需2 h左右,影像分辨率约2.7 cm,适于进行植被与非植被地物分类。通过分类与统计,同样可计算出整块研究区域的植被密度和覆盖度等指标。因分类精度严格可控,且可通过手动目视校正错分对象,因此可将此平方千米级的植被密度与覆盖度数据作为真实值,在更大区域范围上为卫星遥感数据的回归模拟提供验证数据,为机器学习模型验证提供更大数据量的真实值验证集,使得无人机遥感与卫星遥感多源数据可有机结合利用。
基于本方法获得的1.44×104 m2乃至更大范围的无人机源数据,样方尺度和数量可根据需要在后期分析时决定,使得研究者可在多尺度样方上分析植被分布与内部尺度的相互作用,亦可研究样方尺度和数量梯级布设对植被分布情况结论的影响。样地的植被图像数据可长期保存积累,也可在不同时间尺度上进行植被分布格局分析,进而深入探讨尺度效应对生态学过程的影响。传统地面取样方法受人力物力所限,不总具有在较大尺度和较大数量上进行样方取样的条件。2.2.1中利用传统地面冠幅测量法计算植株面积时,结果与手动圈取的真实值间存在偏差,且计算精度不如利用无人机图像分类后的植被分布矢量图求得植株面积的方法。利用无人机方法获得的更大尺度的样方数据使得整体植被调查结果更接近样地真实水平、更具代表性。同时,植株数量、密度和冠幅等指标的分级统计结果可从多角度反映种群结构分布特征,使样方数据信息得到更深层次的挖掘和利用。
格局与生态过程分析是生态学的核心研究问题,利用点格局法进行分析可得到种内和种间的相互作用和相互关系,比样方法分析所得信息更加丰富。进行不同种类荒漠灌木点格局分析时,植株位置信息记录和呈现是进行点格局分析的关键步骤,利用数码相机的地面摄影定位法[31]在一定程度上简化了手工记录植被位置信息的繁复流程。利用无人机平台则可在更大样地范围内通过图像处理一次性提取出所有植被的点坐标数据,继而进行绘图分析,进一步提升了植株位置信息的提取效率和相对位置的精度。影响点格局分析结果准确度的另一关键因素则是植被分类精度,在对多种属植被进行分类时,分类算法的选择和应用至关重要。植被颜色相近时,应进一步深入研究纹理特征和可见光植被指数的选择利用。
4 结论
基于无人机技术,本研究把传统的植被样方面积从100 m2扩大到10 000 m2,并通过图像拼接、裁剪、植被识别和植被分类等步骤,得到不同植物种类的分布矢量图。在此基础上,经过统计分析实现了植被信息多尺度样方调查,并进一步利用植被位置信息自动化提取实现了植被分布点格局分析。通过在荒漠地区的验证,证明本研究提出的方法适用于大范围荒漠植被调查和分布格局分析,具有效率高、结果代表性好等特点。
在无人机图像数据处理方面,应用面向对象分类,可得到准确度较高的荒漠灌木分类分布矢量图;将地物像元先分割再分类,可有效减轻“椒盐现象”。其中,分割步骤可根据像元特征及拓扑关系进行聚类;结合可见光植被指数进行特征空间优化后再分类,可以实现不同植被种类分布图和面积等特征等属性的提取。
在样方面积、样方数量和植被信息量方面,基于植被分布矢量图,可以根据需要布设不同边长及数量的随机样方。通过这个方法,与传统实地样方法相比,样方面积和样方数量可扩大数十倍至百倍,从而实现了多尺度、大面积植被样方调查和分析。同时,还可计算得到整个研究区所有植物个体的数量、面积、密度和冠幅等指标。
在植被空间格局方面,对植被分布矢量图进行地理坐标系配准及植株坐标提取,可实现植株点位置信息的获取,继而实现基于10 000 m2样方的植被点格局分析。
参考文献
An evaluation of the state of spatial point pattern analysis in ecology
[J].
Spatial dispersion and density dependence in a perennial desert shrub (Chrysothamnus nauseosus:Asteraceae)
[J].
Density-dependent spatial patterning of woody plants differs between a semi-arid and a mesic savanna in South Africa
[J].
Illustrations and guidelines for selecting statistical methods for quantifying spatial pattern in ecological data
[J].
High throughput field phenotyping of wheat plant height and growth rate in field plot trials using UAV based remote sensing
[J].
Monitoring height and greenness of non-woody floodplain vegetation with UAV time series
[J].
Use of unmanned aircraft systems to delineate fine-scale wetland vegetation communities
[J].
Improving estimates of fractional vegetation cover based on UAV in alpine grassland on the Qinghai-Tibetan Plateau
[J].
UAVs and machine learning revolutionising invasive grass and vegetation surveys in remote arid lands
[J].
Joint impact of competition,summer precipitation,and maternal effects on survival and reproduction in the perennial Hieracium umbellatum
[J].
Discriminating growth stages of an endangered Mediterranean relict plant (Ammopiptanthus mongolicus) in the arid Northwest China using hyperspectral measurements
[J].
Assessing correlation of high-resolution NDVI with Fertilizer application level and Yield of rice and wheat crops using small UAVs
[J].
Automated parameterisation for multi-scale image segmentation on multiple layers
[J].
Greenness identification based on HSV decision tree
[J].
Color indices for weed identification under various soil,residue,and lighting conditions
[J].
Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status
[J].
Comparison of methods for measuring and assessing carbon stocks and carbon stock changes in terrestrial carbon pools.How do the accuracy and precision of current methods compare? A systematic review protocol
[J].

 甘公网安备 62010202000688号
甘公网安备 62010202000688号
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}