


0 引言
植被覆盖度(Fractional Vegetation Cover,FVC)是植被在地面的垂直投影面积占统计区总面积的比例,是表征植被生长状况的重要参数,也可作为表征植被质量和生态系统变化的重要指标,在陆面大气圈、土壤圈、水圈和生物圈研究中占据重要地位[1]。FVC是土壤-植被-大气传输模型模拟地表和大气边界层交换过程中的重要生物物理参数,在地表过程和气候变化、天气预报数值模拟中需要给予准确的估算;同时也在农业、林业、资源环境管理、土地利用、水文、灾害风险监测、干旱监测等领域有广泛的应用[2]。绿洲是受水分局部稳定聚集而形成的具有较高FVC区域,是适合生物定居和人类生产生活的区域。绿洲植被在控制水土流失、改善生态环境方面起着极为重要的作用,关乎干旱半干旱区生态系统以及区域社会经济的可持续发展[3]。在人类活动和气候变化的双重影响下,绿洲的FVC随着时间的推移发生了巨大的变化。因此,准确监测FVC的长期变化对于资源环境管理、绿洲稳定健康评价、区域可持续发展等至关重要。
自1972年首颗陆地观测卫星(Landsat)发射以来,积累了长期、大量的历史遥感影像,可以实现长时间序列的植被监测[4]。基于卫星遥感技术,应用最广泛的是采用像元二分法计算FVC,但单个像元通常包含植被和其他地物(如土壤、水体、建筑物等),会导致植被信息提取不准确,且因像元二分法中的植被指数阈值难以确定,FVC往往被高估或低估[5-6]。近年来,低空无人机通过挂载各种微型传感器,已广泛应用于FVC监测[7-9]。已有研究表明,无人机结合可见光摄影测量技术可提供厘米级分辨率的影像,显著地提高了FVC反演的精度[10-11]。但无人机可见光照片受日照角度的影响,植被信息往往和地面阴影混淆,一定程度上降低了植被提取的精度。激光雷达相机的发展为植被监测提供了新思路,激光雷达由于主动激光束的穿透,可以表征植被层和地形的垂直分层,可以从点云中生成冠层高度模型(CHM)以估计FVC[12],从而避免地面阴影对FVC的影响,成为准确计算FVC的理想技术。
最近,Ma等[13]利用LiDAR点云数据和可见光照片同时计算山区森林FVC,发现利用LiDAR点云数据计算的FVC精度最高(R2=0.58,RMSE=0.19),但在1 000 m飞行高度采集的数据,空间分辨率较低。Wasser等[14]利用LiDAR点云数据对河岸林过渡带FVC进行计算,结果表明利用LiDAR计算的FVC与实测FVC较为一致(R2=0.59,RMSE=0.02)。王泽华等[15]利用LiDAR数据计算了沟谷地形森林的FVC,结果表明随着坡度上升,FVC的计算精度降低。刘兵兵等[16]利用LiDAR数据对森林FVC进行计算,对全球植被覆盖产品进行了验证,表明利用LiDAR数据计算的植被信息与遥感影像提取的植被信息有较强的一致性。苏阳等[17]基于LiDAR点云数据提取了额济纳绿洲胡杨林核心区的植被类型和结构参数,表明利用LiDAR点云提取植被类型具有非常高的精度(总体精度0.96,kappa系数0.91)。研究表明,当将高分辨率数据聚合成低分辨率数据时,数据的变异性会减小,空间异质性的影响会减弱,这可能会增加FVC与植被指数(GNDVI、EVI、NDVI)的相关性,提高FVC的计算精度[18-20]。因此,本研究引入无人机激光雷达点云提取植被信息,将提取的植被信息与利用Landsat影像计算的植被指数结合,以获得高精度的区域FVC反演,实现长期、大范围、高精度的FVC监测,以期为干旱区植被状况定量动态监测提供新思路,为区域可持续发展的政策制定提供科学依据。
1 材料与方法
1.1 研究区概况
研究区位于中国西北部黑河流域下游的额济纳绿洲,地理坐标为40°53′—42°32′N、100°02′—101°29′E(图1A)。额济纳绿洲地处蒙古高原和阿尔泰山脉交会处,西部为中央大戈壁,东部为巴丹吉林沙漠。区内气候特点为极端干旱,年蒸发量2 094.2 mm,年降水量仅36.5 mm。河岸周围主要分布着以胡杨(Populus euphratica)和多枝柽柳(Tamarix ramosissima)组成的荒漠河岸林,位于东河下游的胡杨林为中国西北第二大胡杨林,也是全球仅存的三大原始胡杨林区之一[21](图1B、C)。近几十年来,在气候变化和人类活动的双重影响下,流入黑河下游的径流急剧减少,导致胡杨林经历了严重的退化。为了恢复这些退化的胡杨林,中国于2000年发起生态输水工程,对下游植被群落结构产生了重要影响。
图1
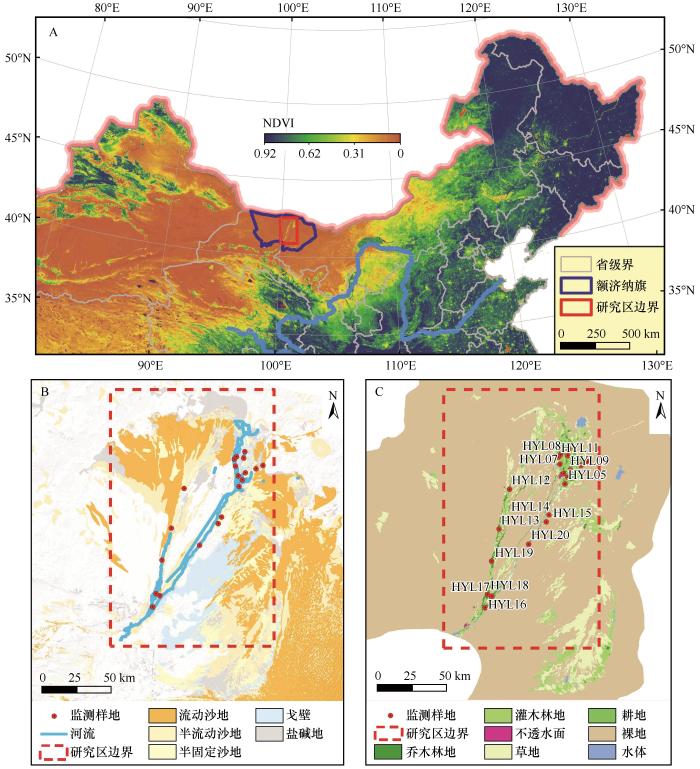
图1
研究区位置(A)、荒漠化类型(B)、土地利用与监测样地分布(C)
Fig.1
The location (A), the type of desertification (B) of the study area and the distribution of land use and survey sites (C)
1.2 研究方法
图2
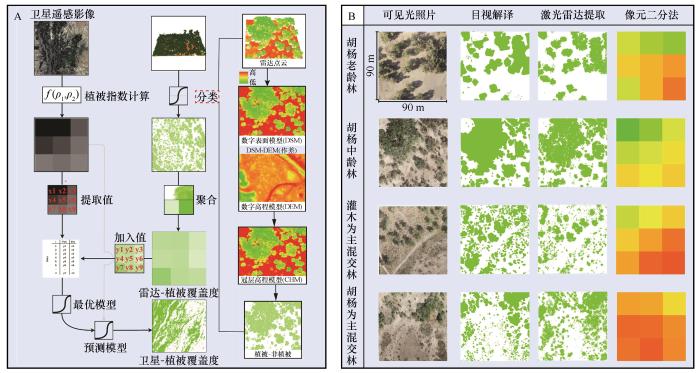
图2
研究技术流程(A)及利用不同方法FVC提取示例(B)
Fig.2
Study the technical process (A) and examples of vegetation coverage extraction by different methods (B)
1.2.1 无人机数据获取
本研究采用的无人机激光雷达系统(UAV-LiDAR)以DJI Matrice 350 RTK四旋翼无人机为平台,集成高精度惯导系统、测绘相机和三轴云台的激光发射与接收器,通过搭载DJI L1激光雷达构成一套完整的监测系统。于2023年9月1—10日,在天气晴朗无风或低风速条件下,针对研究区植被覆盖情况开展植被调查。监测样地均匀分布于胡杨林以及河道两侧,每幅航拍样地的范围为100 m×100 m,基本涵盖了低、中、高植被覆盖的区域类型。飞行作业时,无人机飞行高度为30 m,航向重叠率80%,旁向重叠率70%,雷达点云密度约为3 000点•m-2,可见光照片分辨率约为0.7 cm,共计调查20个样地(图1C)。使用DJI Terra软件对20个样地航拍的激光雷达点云数据进行预处理,将可见光影像进行辐射校正及拼接处理,生成LAS文件和高清数字正射影像(Digital Orthophoto Map,DOM)。
1.2.2 植被覆盖度提取
将无人机激光雷达点云数据以一种基于不规则三角网(Triangulated Irregular Network,TIN)的渐进加密算法进行滤波,区分地面点与非地面点。基于滤波算法将非地面点中的植被点和可能打在非植被类的激光脚点分离,将地面类的点云数据生成分辨率为0.1 m的DEM(Digital Elevation Model,DEM),将植被类的点云数据生成分辨率为0.1 m的数字表面模型(Digital Surface Model,DSM)。由此,将得到的DEM与DSM之间的差值作为冠层高度模型(Canpy Height Model,CHM)。在冠层高度模型中,以1 m为搜索阈值,搜索该范围内冠层高度不低于0.1 m,即像元值不小于0.1的像元,以返回的像元数与搜索范围内总像元数的比值作为中心像元的FVC[22],得到由激光雷达点云数据提取的FVC产品。
像元二分法常用于基于卫星影像的FVC长期监测。像元二分法假设每个像元的NDVI值由植被和土壤组成,可以用以下公式计算:
式中:FVC为植被覆盖度;NDVIsoil和NDVIveg分别为土壤和植被像元的NDVI值。基于研究区实际情况和前人研究,选择累积频率为5%的NDVI值作为NDVIsoil,累积频率为95%的NDVI值作为NDVIveg。
1.2.3 遥感影像及植被指数计算
本研究采用的卫星遥感影像为2021年美国地质调查局(USGS)在GEE平台上发布的Landsat Collection 2 Level 2数据集。该数据集包含经几何校正和大气校正后的地表反射率和地表温度。为了更好地对应无人机数据采集时间,本研究选取1986—2023年8—9月云量低于10%的数据集。由于时间尺度大,不同年份和数据集使用的卫星/传感器各不相同。如表1所列,选取1986—1998年的Landsat 5 TM影像,选取1999—2012年Landsat 7 ETM+影像,选取2013—2023年的Landsat 8 OLI/TIRS影像,空间分辨率30 m。
表1 Landsat卫星数据源基本信息
Table 1
| 年份 | 数据集 | 卫星 | 使用波段 |
|---|---|---|---|
| 1986—1998 | LANDSAT/LT05/C02/T1_L2 | Landsat 5/TM | SR_B (1, 2, 3, 4, 5, 7) |
| 1999—2012 | LANDSAT/LE07/C02/T1_L2 | Landsat 7/ETM+ | SR_B (1, 2, 3, 4, 5, 7) |
| 2012—2023 | LANDSAT/LC08/C02/T1_L2 | Landsat 8/OLI/TIRS | SR_B (2, 3, 4, 5, 6, 7) |
本研究选用了适用于干旱区植被监测常用的6个植被指数[23]——归一化差异植被指数(NDVI)、核归一化差异植被指数(kNDVI)、绿色归一化差异植被指数(GNDVI)、增强植被指数(EVI)、土壤调节植被指数(SAVI)、改进型土壤调节植被指数(MSAVI)。所有植被指数均由Landsat影像计算。
归一化差异植被指数(NDVI)利用近红外波段和红波段之间的差异来评估植被健康状况,可用于监测作物生长和检测干旱胁迫。
核归一化差异植被指数(kNDVI)最大限度地利用了光谱信息,解决了卫星地球观测中对陆地生物圈长期存在的问题,同时能更准确地测量陆地碳源/汇动态和稳定大气CO2、缓解全球气候变化的潜力。
绿色归一化差异植被指数(GNDVI)与NDVI类似,但使用绿色波段而不是红色波段。它在植被呈浓绿色的区域特别有用,可应用于监测草原和其他植被密度较低的区域。
增强植被指数(EVI)是NDVI的改进,并考虑了大气干扰和土壤背景反射率。它在植被覆盖茂密、NDVI可能饱和的地区特别有用,可应用于监测森林覆盖和跟踪火灾或其他干扰后的植被恢复情况。
土壤调节植被指数(SAVI)与NDVI类似,但包含土壤亮度校正因子,以提高其在土壤反射率变化的区域中的准确性。SAVI在干旱和半干旱地区有应用,这些地区植被覆盖率较低,土壤亮度会显著影响植被检测。
改进型土壤调节植被指数(MSAVI)与SAVI类似,但增强了土壤亮度校正因子。它对土壤亮度高的地区特别有用,例如沙漠。
式(
1.3 植被覆盖度模型构建及精度评价
在像元尺度上,首先将利用无人机激光LiDAR点云提取的植被信息重采样为30 m×30 m栅格像元,然后与2023年的Landsat影像像元进行对齐。利用每个Landsat像元创建的唯一ID号,将Landsat数据计算出的植被指数与聚合的FVC连接起来,提供建模数据。随后通过线性回归建立FVC模型。线性回归被广泛应用于遥感领域的数据分析。
式中:y表示通过聚合得到的Landsat像元的FVC值;x是根据遥感影像计算的植被指数。
在此基础上,基于2023年8—9月的Landsat影像选取最佳植被指数和利用雷达点云数据提取的植被信息建立反演模型。为了定量评价雷达点云模型,计算了决定系数(R2)和均方根误差(RMSE)来评估模型的精度。
式中:
1.4 植被覆盖度时空变化
采用Theil-Sen Median和Mann-Kendall方法评估额济纳绿洲FVC长时间序列变化趋势。Theil-Sen Median趋势分析是一种稳健的非参数统计方法,其优势在于不受异常值和缺失值的影响,常被用于长时间序列数据的变化趋势分析:
式中:FVCi 和FVCj 分别为第i年和第j年的FVC值(1986≤i<j≤2023);
Mann-Kendall(M-K)统计检验是一种非参数的检验方法,其优点在于不受少数异常值的干扰且数据不需要服从特定的分布,能较好地处理缺失值和异常值,适用于时间序列变化的突变检验。Theil-Sen Median趋势分析和M-K检验基于MATLAB 2018a平台完成,FVC时空变化分析基于ArcMap 10.8平台完成。
2 结果
2.1 基于无人机激光雷达的植被覆盖度提取与验证
基于人工目视解译、LiDAR和像元二分法计算的样地FVC如图3A所示。所调查20个样地中,目视解译、LiDAR和像元二分法计算的FVC最大值分别为0.68、0.60和0.58;最小值分别为0.12、0.16和0.10;平均值分别为0.36、0.36和0.29。其中,基于LiDAR提取的HYL15和HYL16的FVC比目视解译的FVC低,而HYL04、HYL08和HYL17偏高。通过逐一检查发现,HYL15和HYL16是以灌木为主的胡杨混交林,样地内含有较多的低矮的灌木以及草本,这使得LiDAR低估了样地的FVC。检查FVC偏高的HYL04、HYL08和HYL17样地,发现这3个样地内均含有枯死的胡杨,LiDAR将胡杨枯枝识别为植被从而高估了FVC。总体来看,LiDAR点云计算结果与目视解译的结果基本一致,而像元二分法与目视解译结果相差大。可见,基于LiDAR点云计算的FVC相较于像元二分法更接近样地真实情况。
图3
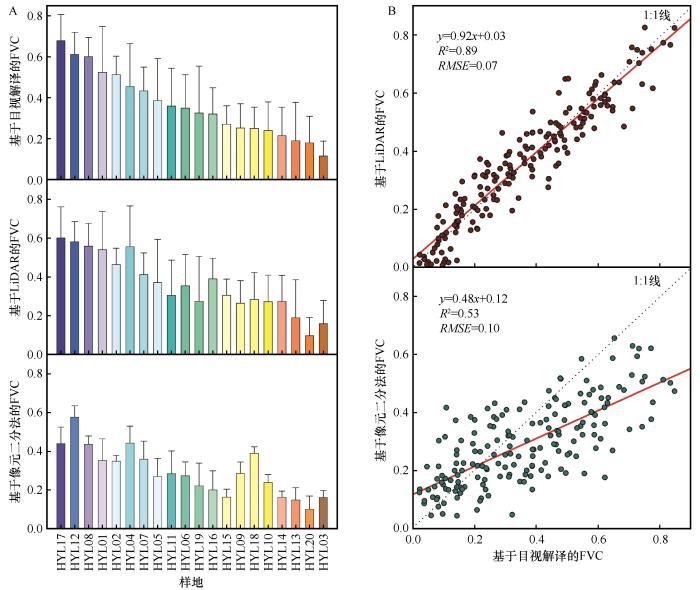
图3
利用不同方法提取的样地FVC变化(A)及相关关系(B)
Fig.3
FVC changes (A) and correlation (B) in different plots extracted by different methods
本研究将无人机航拍影像与无人机航拍时间对应的Landsat遥感影像对齐,从100 m×100 m的样地中提取9个Landsat像元。将目视解译、LiDAR计算的FVC聚合成30 m×30 m的FVC像元,共计180个。建立利用LiDAR、像元二分法计算的FVC与目视解译的FVC线性回归模型。从图3B可见,基于LiDAR的FVC与目视解译的FVC关系模型中,数据点均匀分布于1∶1线的两侧,拟合效果良好;而基于像元二分法的FVC与目视解译的FVC关系模型中,数据点分布较离散,大量分布于1∶1线的下方。这表明两种方法均低估了FVC,基于LiDAR方法和像元二分法的模型分别低估了0.08和0.52的FVC。对比两种方法的R²和RMSE,基于LiDAR方法的模型(R²=0.89,RMSE=0.07)明显优于像元二分法的模型(R²=0.53,RMSE=0.10)。这表明利用LiDAR方法更能高精度地计算FVC,能够用于后续结合Landsat遥感影像建模工作。
2.2 模型建立及精度评价
由图4可知,利用6个植被指数建立的模型中R2为0.59~0.68,决定系数结果在同一数量级内,差异不显著。MSAVI的R2值最大(0.68),故以回归系数所得结果作为参考得出结论,在线性回归模型中,自变量MSAVI对因变量FVC变化影响程度最为显著;进一步分别运用各植被指数建立的模型反演FVC,结果表明,基于MSAVI的模型RMSE最小(0.12)。综上,说明反演研究区植被覆盖状况的最优植被指数为改进型土壤调节植被指数(MSAVI),故本研究采用MSAVI(x)与FVC(y)的关系模型y=2.53x-0.07进行后续研究。
图4
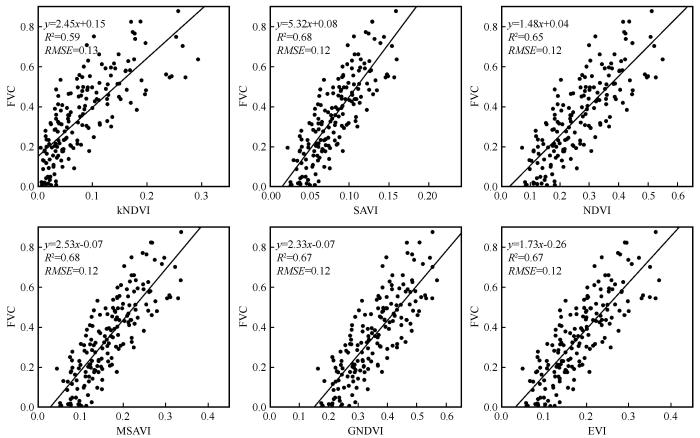
图4
基于LiDAR点云计算的FVC与植被指数关系
Fig.4
Relationship model between FVC and vegetation index based on LiDAR point cloud computing
2.3 植被覆盖度的时空变化
基于GEE平台及所构建的最优模型,以当年8—9月FVC平均值代表当年植被的状态,反演了1986—2023年额济纳绿洲的FVC。结合研究区实际情况,本研究以FVC<0.15、0.15≤FVC<0.3、0.3≤FVC<0.5、0.5≤FVC<0.8、0.8≤FVC≤1分别表示研究区植被覆盖为极低覆盖、低覆盖、中覆盖、较高覆盖和高覆盖。
图5A所示为38年间FVC平均值的空间分布,各级别FVC所占面积比例的结果表明,研究区有67.3%的植被处于极低覆盖和低覆盖,中覆盖占比为24.8%,较高覆盖和高覆盖占比为7.9%。为了研究FVC随时间变化的特点,制作年际FVC变化图。从图5B可见,额济纳绿洲1986—2023年FVC为0.18~0.25,整体呈阶段性增加趋势。其中1986—2000年FVC为0.18~0.19;2001—2012年,额济纳绿洲FVC呈现波动增长的趋势,年增长率为0.31%;2013—2023年上升略有减缓,年增长率为0.19%,表明近40年额济纳绿洲植被整体生长状况开始好转,但不同时期存在明显差异。进一步分析FVC标准差变化可知,1986—2023年FVC标准差在0.06~0.15波动,1986—2000年整体波动较大,FVC值变化也较大,说明区域植被状况空间异质性增强;2001—2012年整体呈缓慢上升趋势,说明这一时段FVC空间差异变化较小;2013—2023年标准差值先呈现下降的趋势,在2020年后值变得不稳定。这表明在生态输水工程实施后,植被状况开始趋于稳定。
图5
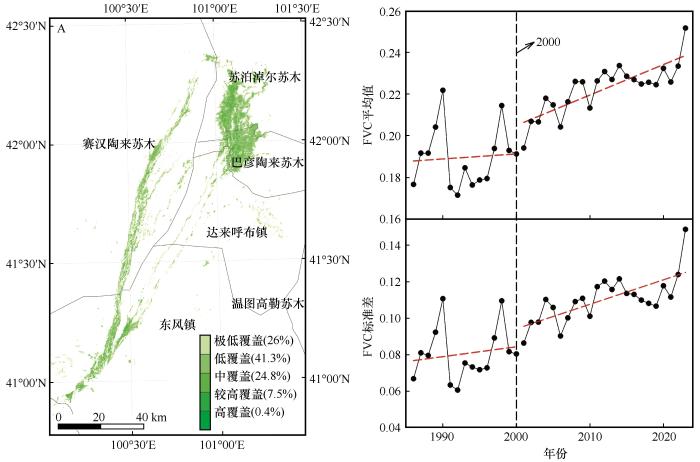
图5
基于LiDAR和MSAVI的1986—2023年额济纳绿洲FVC空间分布(A)及年际变化(B)
Fig.5
Spatial distribution (A) and interannual variation (B) of FVC in Ejin Oasis from 1986 to 2023 based on LiDAR and MSAVI
额济纳绿洲植被分布具有明显的空间集聚性(图6)。在北部,植被大片聚集分布于苏泊淖尔苏木和巴彦陶来苏木;在南部,植被沿着东河和西河分布。1986、2000年和2023年极低覆盖的区域占比逐渐下降,分别为37.3%、32.7%和25.8%;低覆盖占比的区域也逐渐下降,分别为56.0%、55.2%和41.3%;而中覆盖和较高覆盖的区域所占比例上升较多,分别由1986年的6.6%和0.0上升到2023年的24.7%和7.7%,主要位于东河下游的胡杨林和西河上游。2023年出现了高覆盖的区域,所占比例为0.5%,主要位于东河下游。总体上,东河下游绿洲FVC增加幅度较大,而西河中游植被覆盖增加面积较大。
图6
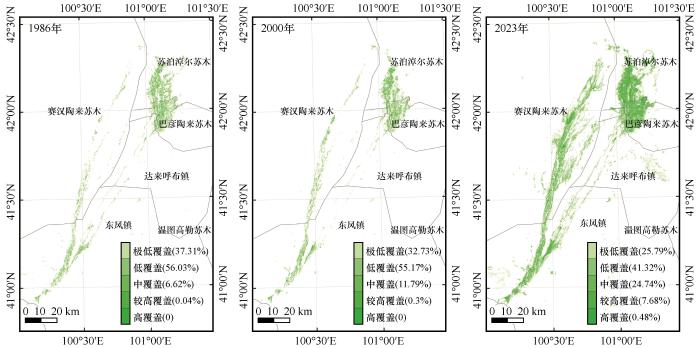
图6
额济纳绿洲1986、2000、2023年均FVC空间格局
Fig.6
Annual FVC spatial pattern of Ejin Oasis in 1986, 2000, and 2023
由图7可见,1986—2000年,植被覆盖退化和改善的区域面积分别为334 km²和250 km²,其中显著退化的区域主要位于东河下游以及中游,年退化约22.3 km²;而植被改善区域主要位于东河下游和西河中游,年改善约56.7 km²。在生态输水工程实施后的2000—2023年,植被覆盖改善是主要趋势,植被改善区域高达1 119 km²,年改善约46.6 km²,而退化的面积仅50 km²,分布在东河下游以及上游。1986—2023年,植被覆盖由1986—2000年的退化趋势逆转为2000—2023年的改善趋势,生态输水工程成效显著。
图7
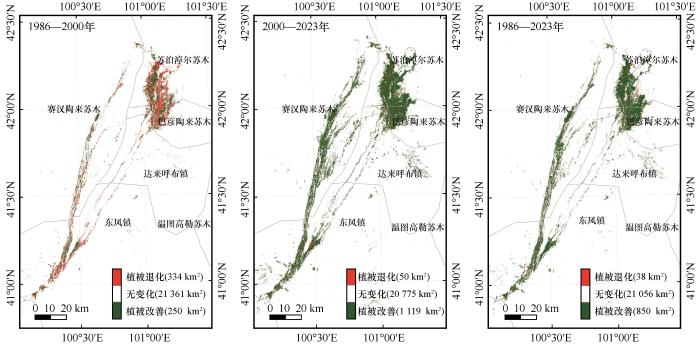
图7
额济纳绿洲1986—2000、2000—2023、1986—2023年植被变化
Fig.7
Vegetation changes in Ejin Oasis in 1986-2000, 2000-2023, 1986-2023
3 讨论
目前,FVC监测方法主要包括地面测量、卫星遥感反演和无人机遥感技术,其中精度最高的是无人机遥感技术[9]。已有研究表明,无人机可见光照片为传统地面测量提供了快速和可靠的替代方案[25]。Alvarez-Vanhard等[26]发现,由于地面实测数据与空间分辨率较粗的卫星影像(如Landsat)的尺度差异,人工采集地面参考数据具有主观性。本研究使用来自20个样地的无人机数据作为训练样本,这些区域的FVC由低到高,为建立FVC模型提供了有利条件。Riihimäki等[19]收集了北极3个典型地区(低、中、高FVC)的无人机影像,并结合卫星影像建立了FVC预测模型,取得了良好的结果。本研究利用无人机采集的超高空间分辨率正射影像(GSD<0.7 cm)和超高密度激光雷达点云(3 000 点·m-2),结合卫星遥感技术进行FVC反演。通过这种方法,为结合卫星影像建模提供了更准确的训练样本。前人研究多为单独采用可见光照片计算或利用LiDAR点云数据计算FVC,少有研究进行交互验证。本研究采用人工目视解译无人机可见光照片的FVC作为样地FVC的真实值,与利用LiDAR点云计算的FVC进行交互验证。检查利用LiDAR计算与目视解译的FVC相差较大的样地,发现样地内存在低矮草本(高度<5 cm),会导致激光雷达无法产生回波而低估FVC;而对于存在枯死木的样地,雷达会产生回波从而高估FVC[27]。
尽管高分辨率卫星(Sentinel-2,GF-2)能显示更多的植被细节,但无法满足本研究进行长时间序列分析的需求,故本研究采用分辨率为30 m的Landsat影像。前人研究发现,高分辨率影像向粗分辨率遥感影像(如Landsat影像)聚合可以提高FVC的估算精度[11,19]。基于植被指数(如NDVI)的像元二分法是目前计算FVC最广泛的方法[28]。已有研究表明NDVI与FVC之间存在较强的线性相关[29]。本研究使用基于NDVI的像元二分法反演了研究区FVC,发现使用像元二分法计算的FVC远小于人工目视解译的真实值,周红敏等[30]研究结果也表明从低空间分辨率数据中计算的NDVI值低于真实值。由于荒漠区域植被稀疏,土壤的光谱反射较强,植被的光谱反射较弱,这就要求建立回归模型的植被指数对植被覆盖更为敏感,且对背景因素不敏感。为此,本文选取并计算了在干旱区常用的6个植被指数,结果表明利用考虑了土壤背景的改进型土壤调节植被指数(MSAVI)对于FVC的解译更为精确,这与前人研究结论[31-33]一致。
当前内陆河流域下游绿洲植被变化的研究偏向于生态输水工程后,对于输水工程前的研究较少。本研究基于建立的模型反演近40年额济纳绿洲FVC的变化,发现1986—2023年额济纳绿洲植被覆盖呈现阶段性变化,韩子言等[34]的研究也得到了相同的结果。在1986—2000年时段,额济纳绿洲FVC呈现波动变化,植被呈退化趋势。高冠龙等[35]基于TM卫星影像研究土地覆盖情况也得出相同的结论。2001—2012年,额济纳绿洲FVC呈现波动上升的趋势,增加的主要原因为黑河生态调水工程的实施。2013—2023年额济纳绿洲FVC波动较小,整体趋于稳定,且中覆盖和高覆盖所占比例更高,这与胡洁等[36]的研究结果一致。本研究表明,生态输水工程实施前(1986—2000年)植被的退化面积为334 km2,生态输水工程实施后(2001—2023年)植被的改善面积为1 119 km2,这与王川等[37]的研究结果一致。本研究结合高精度无人机数据和长时间序列遥感数据监测干旱区植被变化。然而,由于受到气象条件及传感器稳定性等因素的影响,数据也存在一定的不确定性,未来应加强多尺度数据结合来提升评估结果的准确性。
4 结论
在生态环境极为脆弱的干旱区内陆河流域,由于绿洲农业和城镇化发展对水土资源需求的激增,对植被产生了重要的影响。本研究利用无人机激光雷达点云数据计算FVC发现,相较于广泛使用的像元二分法,利用无人机雷达点云可以更准确计算FVC,结果显示R2增加了0.36,RMSE降低了0.03。利用无人机激光雷达点云提取的植被信息结合Landsat影像计算的植被指数发现,考虑了土壤背景影响的MSAVI与FVC相关性最强(R2 =0.68,RMSE=0.12),可有效提高FVC计算的精度,建议计算植被盖度时应选用MSAVI而非常用的NDVI。基于所构建模型反演额济纳绿洲长时间FVC变化情况,发现额济纳绿洲植被在1986—2000年处于退化的状态,在2001—2023年大面积得到改善。由此可见,生态输水工程对额济纳绿洲植被变化起到积极影响。本研究旨在验证利用多源遥感数据对研究区植被覆盖进行监测的可行性,以为干旱区植被变化监测提供了一种更加准确、有效的技术手段。
参考文献
Assessing the impacts of an ecological water diversion project on water consumption through high-resolution estimations of actual evapotranspiration in the downstream regions of the Heihe River Basin,China
[J].
Long-term hindcasts of wheat yield in fields using remotely sensed phenology,climate data and machine learning
[J].
Improving fractional vegetation cover estimation with shadow effects using high dynamic range images
[J].
Evaluation of the vegetation-index-based dimidiate pixel model for fractional vegetation cover estimation
[J].
Optimal altitude,overlap,and weather conditions for computer vision UAV estimates of forest structure
[J].
水稻多时相植被指数特征及覆盖度提取研究
[J].
UAV-based remote sensing using visible and multispectral indices for the estimation of vegetation cover in an oasis of a desert
[J].
Estimating fractional vegetation cover of maize under water stress from UAV multispectral imagery using machine learning algorithms
[J].
Improving estimates of fractional vegetation cover based on UAV in alpine grassland on the Qinghai-Tibetan Plateau
[J].
New opportunities for forest remote sensing through ultra-high-density drone lidar
[J].
Comparison of canopy cover estimations from airborne LiDAR,aerial imagery,and satellite imagery
[J].
Quantifying land use effects on forested riparian buffer vegetation structure using LiDAR data
[J].
基于LiDAR数据的额济纳绿洲胡杨(Populus euphratica)河岸林植被覆盖分类与植被结构参数提取
[J].
Estimating fractional cover of tundra vegetation at multiple scales using unmanned aerial systems and optical satellite data
[J].
Approach for monitoring spatiotemporal changes in fractional vegetation cover through unmanned aerial system-guided-satellite survey:a case study in mining area
[J].
Responses of riparian forests to flood irrigation in the hyper-arid zone of NW China
[J].
Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas
[J].
Satellite solar-induced chlorophyll fluorescence and near-infrared reflectance capture complementary aspects of dryland vegetation productivity dynamics
[J].
A soil-adjusted vegetation index (SAVI)
[J].
Modelling high arctic percent vegetation cover using field digital images and high resolution satellite data
[J].
Can UAVs fill the gap between in situ surveys and satellites for habitat mapping?
[J].
Monitoring and analysis of crop irrigation dynamics in Central Italy through the use of MODIS NDVI data
[J].
基于植被指数极旱荒漠区生物量模型研究:以安西极旱荒漠保护区北片为例
[J].
Estimating aboveground biomass in Mu Us Sandy Land using Landsat spectral derived vegetation indices over the past 30 years
[J].

 甘公网安备 62010202000688号
甘公网安备 62010202000688号
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}